DJI Matrice M210 (aéronef télépiloté), C-2105569275
Police régionale de York
et
Cessna 172N, C-GKWL
Canadian Flyers International Inc.
Aéroport municipal de Toronto/Buttonville (Ontario), 1,2 NM NW
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 10 août 2021, l’aéronef Cessna 172N (immatriculation C-GKWL, numéro de série 17268441) exploité par Canadian Flyers International Inc. effectuait un vol d’entraînement de jour selon les règles de vol à vue, en approche finale vers la piste 15 de l’aéroport municipal de Toronto/Buttonville (Ontario), avec à bord un élève-pilote et un instructeur de vol. Vers 13 h 01, heure avancée de l’Est, l’élève-pilote et l’instructeur de vol ont entendu et ressenti un impact franc à l’avant de l’aéronef. Soupçonnant un impact d’oiseau, ils ont continué l’approche et ont effectué un atterrissage sans incident, puis ont quitté la piste et se sont stationnés sur l’aire de trafic. Après avoir stationné l’aéronef, ils ont constaté des dommages sur le capot avant gauche sous l’hélice, mais rien n’indiquait qu’un oiseau avait heurté l’aéronef.
Peu après, un membre de la police régionale de York a signalé au personnel de l’aéroport qu’il pensait qu’une collision s’était produite entre l’aéronef télépiloté qu’il contrôlait et un autre aéronef. L’aéronef télépiloté, un DJI Matrice M210 (immatriculation C-2105569275), était en vol stationnaire à 400 pieds au-dessus du sol lorsque les 2 aéronefs sont entrés en collision. Le DJI Matrice M210 a été détruit.
Ni les pilotes du Cessna 172N ni personne au sol n’ont été blessés.
1.0 Renseignements de base
1.1 Déroulement des vols
Le 10 août 2021, vers 11 h 30Note de bas de page 1, l’aéronef Cessna 172N (Cessna) (immatriculation C-GKWL, numéro de série 17268441) exploité par Canadian Flyers International Inc. (Canadian Flyers) a quitté l’aéroport municipal de Toronto/Buttonville (CYKZ) (Ontario) pour effectuer un vol d’entraînement de jour selon les règles de vol à vue (VFR). Un instructeur de vol et un élève-pilote étaient à bord. Ils ont décollé et se sont rendus dans une zone d’entraînement au nord de l’aéroport pour effectuer des exercices.
Vers 12 h 02, le personnel des opérations de la police régionale de York (York Regional Police, YRP) a demandé à l’unité de soutien aérien (Air Support Unit, ASU) de la YRP de fournir des services d’imagerie à l’aide d’un aéronef télépiloté (ATP), à l’appui d’une opération policière ayant lieu à 1,2 mille marin (NM) au nord-ouest de CYKZ, sous la trajectoire d’approche de la piste 15.
À 12 h 20, le pilote de l’ATP à l’étude est arrivé dans son véhicule à un stationnement situé à environ 0,39 NM au nord-est du lieu de l’événement. Ce véhicule contenait tout l’équipement nécessaire à son rôle, y compris un téléviseur à écran plat sur lequel il pouvait projeter la transmission vidéo de l’ATP.
L’ATP était un DJI Matrice M210 (immatriculation C-2105569275). Un certain nombre de membres de la YRP se préparaient pour l’opération policière et attendaient que l’ATP soit en mesure de fournir des images de reconnaissance avant de pouvoir planifier et exécuter l’opération.
Le pilote de l’ATP a commencé son 1er vol à 12 h 32. L’objectif était d’effectuer une reconnaissance de la zone opérationnelle et de tenter de localiser un individu potentiellement armé. Peu après le décollage de l’ATP, le pilote de l’ATP a demandé au groupe d’agents de police qui se tenaient à proximité que quelqu’un surveille l’ATP pendant le vol, et 1 des agents à proximité lui a répondu.
Le vol s’est déroulé sur une période d’environ 16 minutes afin de tenter de localiser l’individu, et le pilote a fait voler l’ATP à divers endroits, sous la direction de l’agent commandant l’opération policière, qui se tenait à proximité. Le pilote de l’ATP a posé l’appareil vers 12 h 48 afin de changer les batteries avant d’entreprendre un 2e vol.
Pendant ce temps, les pilotes du Cessna avaient terminé leurs exercices dans la zone d’entraînement et retournaient à l’aéroport. Ils ont fait les appels radio appropriés pour déclarer leur intention de survoler l’aéroport et de rejoindre le vent arrière de droite pour accéder à la piste 15. Aucun autre trafic ne transmettait sur la fréquence obligatoire (MF)Note de bas de page 2 de CYKZ à ce moment-là, et les pilotes n’avaient entendu aucune autre transmission sur cette fréquence pendant leur vol de retour. Les pilotes recherchaient activement d’autres aéronefs dans la zone et n’en ont vu aucun. Vers 12 h 57, ils ont rejoint le vent arrière de droite pour accéder à la piste 15, en faisant un appel radio.
À 12 h 56, le pilote de l’ATP a entamé son 2e vol, au cours duquel il devait fournir une transmission vidéo du lieu où se déroulait l’opération policière. L’ATP a été amené à une hauteur de 400 pieds au-dessus du sol (AGL) et positionné de manière à fournir les images nécessaires. L’ATP est resté stationnaire tandis que les membres de la police proches du pilote de l’ATP pouvaient suivre le déroulement de l’opération sur l’écran de télévision.
À 13 h 01, alors que l’ATP était en vol stationnaire depuis plus de 2 minutes, une collision s’est produite avec le Cessna, qui était en approche finale vers la piste 15 (figure 1), à environ 1,2 NM du seuil de la piste, et se déplaçait à une vitesse d’environ 65 nœuds.

Les pilotes du Cessna ont entendu et ressenti un impact franc et ont soupçonné qu’ils avaient heurté un oiseau. L’avion a continué à voler normalement et les pilotes ont poursuivi leur approche, puis ont effectué atterrissage sans incident. Les pilotes ont roulé jusqu’à l’aire de stationnement, où ils ont coupé le moteur de l’avion avant d’en sortir pour évaluer les dommages.
Le pilote de l’ATP, après avoir perdu toute communication avec l’ATP, a commencé à scruter le ciel pour localiser l’ATP. Il a alors entendu puis vu l’avion. D’après la position et la direction de vol de l’avion, il lui est apparu évident qu’il y avait eu une collision entre l’ATP et l’avion.
À 13 h 05, le pilote de l’ATP a téléphoné au directeur d’aéroport de CYKZ pour signaler la collision présumée et vérifier si l’avion avait atterri en toute sécurité. Le directeur d’aéroport n’avait pas encore été informé de la collision, mais il a appris peu après qu’un possible impact d’oiseau avait été signalé.
Lorsque les pilotes du Cessna et le personnel de maintenance de Canadian Flyers ont appris que le pilote de l’ATP de la YRP avait signalé une collision possible, ils ont compris que la collision avait eu lieu avec l’ATP et non avec un oiseau.
1.2 Personnes blessées
Il n’y a eu aucun blessé.
1.3 Dommages aux aéronefs
1.3.1 Cessna 172N
Le Cessna présentait des dommages sur le capot inférieur gauche du moteur et la boîte à vent du carburateur, ainsi que des rayures mineures sur l’hélice (figure 2).

1.3.2 Aéronef télépiloté
L’ATP a été détruit (figure 3).

1.4 Autres dommages
Il n’y a eu aucun autre dommage.
1.5 Renseignements sur le personnel
1.5.1 Pilotes du Cessna 172N
Au moment du vol à l’étude, l’instructeur et l’élève-pilote étaient tous deux titulaires des licences appropriées et possédaient des certificats médicaux valides, conformément à la réglementation en vigueur.
1.5.2 Pilote de l’aéronef télépiloté
Les dossiers indiquaient que le pilote de l’ATP avait les licences et les qualifications nécessaires pour effectuer le vol, conformément à la réglementation en vigueur : il était titulaire d’un certificat de pilote – petit aéronef télépiloté (VLOS)Note de bas de page 3 – opérations avancées. De plus, le pilote de l’ATP possédait un certificat restreint d’opérateur radio (compétence aéronautique) (CRO-A) l’habilitant à utiliser une radio aéronautique, ce qu’il savait faire.
1.6 Renseignements sur les aéronefs
1.6.1 Cessna 172N
Le Cessna 172N est un aéronef monomoteur à voilure haute utilisé dans de nombreuses écoles de pilotage dans le monde. Le Cessna 172N à l’étude a été construit en 1976. L’enquête n’a relevé aucun problème lié à l’équipement, à la maintenance ou à la certification de l’aéronef ni aucun autre problème qui aurait pu empêcher le fonctionnement normal de l’aéronef durant le vol à l’étude.
1.6.2 DJI Matrice M210
Le DJI Matrice M210 est un ATP de type quadricoptère avec une masse maximale au décollage de 6,14 kg (13,5 livres) et des dimensions de 34,9 sur 34,6 sur 14,9 pouces (887 sur 880 sur 378 mm) (figure 4). Selon la mission prévue, différentes charges utiles peuvent y être attachées, comme des caméras à infrarouge ou à haute définition. L’ATP est contrôlé à l’aide d’une télécommande avec viseur intégré, ou en branchant un téléphone intelligent à un contrôleur et en utilisant l’écran du téléphone comme viseur.

Dans l’événement à l’étude, le pilote pilotait l’ATP à l’aide d’un contrôleur intelligent DJI Cendence équipé d’un écran DJI CrystalSky (figure 5). La transmission vidéo était configurée pour s’afficher également sur un écran de télévision plat monté sur le véhicule de déploiement de l’ATP. L’écran de télévision affiche les images aériennes en temps réel, mais pas les renseignements télémétriques qui sont affichés sur l’écran CrystalSky monté au-dessus du contrôleur Cendence, comme les renseignements sur l’altitude et les avertissements de trafic.
L’ATP est équipé d’un récepteur de surveillance dépendante automatique en mode diffusion (ADS-B), qui capte les signaux des aéronefs à proximité équipés d’un système ADS-B et alerte les pilotes d’ATP au moyen d’un avertissement de trafic. Le Cessna n’était pas équipé d’un système ADS-B et n’aurait donc pas généré d’avertissement de trafic.
L’ATP à l’étude était enregistré auprès de Transports Canada (TC) comme l’exige la réglementation.

1.7 Renseignements météorologiques
Au moment de l’événement, la station météorologique la plus proche, située à l’aéroport international Lester B. Pearson-Toronto (CYYZ), à 16 NM au sud-ouest, indiquait un plafond de nuages fragmentés à 2200 pieds AGL, un ciel couvert à 13 000 pieds AGL, un vent du 160° vrais à 10 nœuds et une visibilité de 15 milles terrestres.
Les conditions météorologiques n’ont pas été retenues comme facteur dans l’événement à l’étude.
1.8 Aides à la navigation
Sans objet.
1.9 Communications
L’espace aérien entourant CYKZ est une zone de contrôle de classe E, du sol à 2000 pieds au-dessus du niveau de la mer, où une MF de 124,8 MHz est utilisée pour les communications.
Dans un espace aérien contrôlé de classe E, le contrôle de la circulation aérienne (ATC) assure l’espacement entre les aéronefs volant selon les règles de vol aux instruments. Pour les aéronefs en vol VFR, toutefois, l’ATC ne fournit que des renseignements sur le trafic, à la demande du pilote et lorsque la charge de travail le permet.
Les aéronefs effectuant des vols VFR à CYKZ sont tenus par la réglementation de diffuser leurs intentions et de maintenir une écoute permanente sur la MFNote de bas de page 4. Lors de l’événement à l’étude, les pilotes du Cessna effectuaient une surveillance et diffusaient des messages sur la MF, comme il se doit. Les pilotes d’ATP ne sont pas tenus de diffuser leurs intentions lorsqu’ils se trouvent dans un espace aérien contrôlé.
Les utilisateurs d’ATP doivent recevoir l’autorisation du fournisseur de services de la circulation aérienne (ATS) pour voler dans un espace aérien contrôlé (voir la section 1.17.2.1). La demande d’autorisation doit inclure les coordonnées du pilote et « les moyens utilisés pour assurer une communication bilatérale avec l’unité de services de la circulation aérienne compétenteNote de bas de page 5 ».
Lorsqu’une autorisation est accordée par l’ATS, un numéro de téléphone de l’unité ATC pertinente est inclus dans l’autorisation. Ce numéro de téléphone doit être utilisé en cas d’urgence ou de perte de maîtrise de l’ATP. Cet échange de coordonnées entre le pilote de l’ATP et l’ATS vise à satisfaire à l’exigence du Règlement de l’aviation canadien (RAC) selon laquelle les communications bilatérales doivent être maintenues.
Bien que ce ne soit pas exigé par la réglementation, le pilote de l’ATP surveillait la MF à l’aide d’une radio très haute fréquence (VHF) portative pendant l’événement.
1.10 Renseignements sur l’aérodrome
CYKZ est situé à Markham (Ontario) et est entouré de nombreux bâtiments commerciaux, de routes et de complexes d’habitation à haute densité.
L’aéroport possède 2 pistes sécantes : la piste 03/21 et la piste 15/33. Le circuit de la piste 15 est désigné comme circuit à droite; au moment de l’événement, le Cessna volait conformément à ce circuit.
1.11 Enregistreurs de bord
L’avion à l’étude n’était équipé ni d’un enregistreur de données de vol, ni d’un enregistreur de conversations de poste de pilotage, et aucun de ces dispositifs n’était exigé par la réglementation.
Les paramètres de vol de l’ATP ont été enregistrés sur une carte mémoire embarquée. Les données qu’elle contenait ont été récupérées et ont été utiles à l’enquête.
1.12 Renseignements sur les épaves et sur l’impact
Le Cessna a subi des dommages au niveau du capot avant et de la boîte à vent du carburateur. L’hélice a subi quelques rayures mineures.
Le DJI Matrice M210 a été détruit en conséquence de la collision. La plupart de ses pièces ont été récupérées près du lieu de l’opération policière par les membres de la YRP, après une brève recherche. Les pièces ont été envoyées au Laboratoire d’ingénierie du BST à Ottawa (Ontario). La mémoire non volatile récupérée de l’ATP a fourni des données sur la position exacte de l’ATP au moment de la collision. Cette position correspond à celle du Cessna et se trouvait le long de la trajectoire normalisée de l’approche finale vers la piste 15.
1.13 Renseignements médicaux et pathologiques
Selon les renseignements recueillis au cours de l’enquête, rien n’indique que des facteurs médicaux ou la fatigue auraient nui au rendement de l’un ou l’autre des pilotes.
1.14 Incendie
Il n’y a pas eu d’incendie avant ou après l’événement à l’étude.
1.15 Questions relatives à la survie des occupants
Étant donné que l’ATP a heurté le capot inférieur du Cessna, il n’y a pas eu de conséquences pour l’espace habitable de l’avion lors de la collision.
Des essais réalisés par le Conseil national de recherches du Canada ont été décrits dans son rapport de 2020 intitulé Drone impact assessment on aircraft structure: windshield and leading edge testing and analysis Note de bas de page 6. Les essais ont été réalisés selon les mêmes procédures d’essai que celles utilisées pour évaluer la capacité des pare-brise et des structures du bord d’attaque des ailes des aéronefs à résister aux impacts d’oiseaux. Ces essais ont été effectués sur des pare-brise et des structures de bord d’attaque d’ailes représentatifs d’un grand aéronef commercial. Bien que ces structures soient construites différemment de celles des aéronefs légers, les matériaux sont similaires. Les essais ont été effectués à des vitesses de 140 et 250 nœuds, ce qui est supérieur à la vitesse de vol typique des petits aéronefs.
L’ATP utilisé pour les essais pesait environ 2,6 livres, alors que les oiseaux utilisés lors d’essais précédents pesaient 4 livres. Les dommages causés par l’ATP, en particulier lors des essais sur le pare-brise, étaient nettement plus importants que ceux causés par les oiseaux lors d’essais précédents, malgré le poids inférieur de l’ATP.
1.16 Essais et recherche
1.16.1 Rapports de laboratoire du BST
Le BST a produit le rapport de laboratoire suivant dans le cadre de la présente enquête :
- LP106/2021 – NVM Data Recovery - RPASNote de bas de page 7 [récupération des données de la mémoire non volatile – système d’aéronef télépiloté]
1.17 Renseignements sur les organismes et sur la gestion
1.17.1 Transports Canada
Le 1er juin 2019, TC a publié la partie IX du RAC, qui porte sur l’utilisation des ATP dans l’espace aérien canadien et sur les exigences relatives aux certificats et à l’équipement.
Pour certains types de vols d’ATP, l’utilisateur doit demander un certificat d’opérations aériennes spécialisées (COAS). Parmi ces vols figurent le vol d’un ATP au-delà de la visibilité directe (BVLOS), le vol d’un ATP pesant plus de 25 kg et le vol d’un ATP à une altitude de plus de 400 pieds AGLNote de bas de page 8.
La plupart des utilisateurs de petits ATP n’effectuent pas ces types d’opérations et n’ont donc pas besoin d’un COAS. Étant donné qu’aucun certificat d’exploitation n’est requis, TC n’examine pas et n’approuve pas les manuels, les procédures ou la formation, et il n’effectue pas d’inspection ou de surveillance pour la plupart des utilisateurs de petits ATP, comme la YRP.
1.17.2 NAV CANADA
NAV CANADA est une société sans but lucratif qui possède et exploite le système de navigation aérienne civile du Canada, y compris les services de la circulation aérienne. L’utilisation d’un ATP dans un espace aérien contrôlé nécessite une autorisation de NAV CANADANote de bas de page 9. Cette autorisation ne peut être obtenue qu’au moyen de son logiciel exclusif, appelé NAV Drone.
1.17.2.1 NAV Drone
NAV Drone est une application mise au point par NAV CANADA qui est devenue opérationnelle le 3 juin 2021. Elle est disponible sous forme d’application mobile et d’application Web. Elle fonctionne comme un outil de planification de vol d’ATP et facilite la planification en fournissant aux utilisateurs des avertissements sur des questions de sécurité ou de réglementation en fonction des paramètres du plan de vol saisis. Elle intègre également une carte de la zone de vol prévue qui indique les limites des différents types d’espace aérien. Les utilisateurs de NAV Drone ont un profil personnel contenant leurs titres de compétence et les renseignements relatifs à l’enregistrement des ATP qu’ils ont ajoutés à leur profil.
Pour exercer leurs activités dans un espace aérien contrôlé, les utilisateurs d’ATP sont tenus de fournir à NAV CANADA les détails du vol qu’ils prévoient avant le vol et de demander une autorisation. Dans de nombreux cas, selon le type d’espace aérien, l’autorisation se fera automatiquement et sera reçue presque immédiatement.
Lorsqu’une demande est faite pour un vol dans une zone dont l’espace aérien est plus complexe ou qui empiète sur les trajectoires d’arrivée et de départ des aéronefs, la demande est acheminée à l’unité ATC appropriée, qui l’examine et détermine si l’autorisation peut être accordée. Selon les dossiers de NAV CANADA, depuis que l’application NAV Drone a été lancée, plus de 70 % de toutes les demandes ont été traitées en moins de 24 heures, et plus de 40 %, en moins de 12 heures. Le délai de réponse moyen pour toutes les autorisations en 2022 était de 9 heures. Cependant, il peut falloir jusqu’à 48 heures pour autoriser ou rejeter les demandes plus complexes.
Au moment de l’événement, aucun moyen n’était prévu dans l’application NAV Drone pour donner priorité aux demandes provenant d’utilisateurs policiers. TC peut accorder une exemption à l’article 901.71 du RAC, permettant aux premiers intervenants de voler dans un espace aérien contrôlé sans l’autorisation de NAV CANADA en prenant des mesures spéciales, comme le recours à un observateur visuel supplémentaire. Cependant, un pilote d’ATP bénéficiant de cette exemption reste tenu d’aviser l’unité ATS pertinente par téléphone. La YRP n’avait pas obtenu une telle exemption de TC.
Le pilote de l’ATP en question connaissait l’application NAV Drone et savait que le vol du jour de l’événement se déroulerait entièrement dans la zone de contrôle de CYKZ, ce qui nécessitait une autorisation de l’ATS.
En raison de la nature de l’opération policière en cours, qui concernait un individu potentiellement armé, le pilote de l’ATP ressentait un besoin urgent de faire décoller l’ATP le plus rapidement possible. De plus, le pilote de l’ATP n’avait vu aucun trafic dans la zone pendant la préparation de l’ATP et n’avait entendu aucune transmission récente sur la radio VHF portative. Par conséquent, le pilote de l’ATP n’a pas demandé d’autorisation.
Le 21 octobre 2021, les enquêteurs du BST ont effectué un essai à l’aide de NAV Drone pour déterminer si une autorisation serait accordée pour faire voler un ATP au lieu de la collision, avec une restriction de hauteur de 400 pieds AGL. En raison du lieu et de l’altitude indiqués, et de plusieurs autres facteurs évalués par l’unité ATC compétente, la demande a été refusée et les enquêteurs ont été invités à présenter à nouveau la demande, avec une restriction de hauteur de 100 pieds AGL.
Certains des facteurs que l’ATC évalue avant de délivrer une autorisation sont variables. Par conséquent, il n’a pas été possible de déterminer si une demande pour effectuer le vol de l’ATP à l’étude le jour de l’événement aurait été autorisée.
1.17.3 Police régionale de York
La YRP dessert la région de York, qui compte plus de 1,2 million d’habitants.
Au moment de l’événement, les 5 unités suivantes de la YRP utilisaient un ATP : soutien aérien (Air Support Unit, ASU), sécurité publique, enquêtes sur les collisions majeures, communications intégrées et soutien multimédia. Chacune de ces unités utilisait son propre ATP et avait ses propres pilotes. Chaque unité a un profil de mission typique, qui peut être très différent d’une unité à l’autre.
L’ATP de l’événement à l’étude était utilisé par l’ASU, dont la mission typique consiste à fournir des images en temps réel à l’appui d’activités policières au sol.
1.17.3.1 Unité du soutien aérien
L’ASU a été créée pour appuyer les opérations aériennes à bord d’un hélicoptère Airbus EC120B appartenant à la YRP, qui est piloté par des pilotes civils. Les membres de l’ASU, appelés agents de vol tactique (tactical flight officers, TFO), sont formés aux tactiques de patrouille et d’appréhension de suspects, à la surveillance aérienne et à l’imagerie thermique avancéeNote de bas de page 10.
Le rôle principal du TFO est d’assurer la liaison entre la police au sol et le pilote de l’hélicoptère afin que ce dernier puisse se concentrer sur le pilotage sécuritaire de l’hélicoptère. Les TFO reçoivent une formation sur les opérations en hélicoptère, mais ils ne sont pas pilotes eux-mêmes et ne sont pas autorisés à manipuler les commandes de l’hélicoptère. Au moment de l’événement, l’hélicoptère de la YRP était géré et exploité par Canadian Helicopters Ltd. Comme l’hélicoptère est géré par un tiers, la YRP ne possède pas et n’est pas tenue de posséder de certificat d’exploitant aérien. En conséquence, elle n’est pas tenue d’employer du personnel possédant une expérience en aviation pertinente pour superviser ses opérations aériennes; ce rôle est assumé par la compagnie de gestion.
En 2018, l’ASU a commencé à utiliser des ATP en guise de solution de rechange à l’utilisation de l’hélicoptère. Les TFO étant déjà formés à la surveillance et à l’imagerie aériennes, il a été décidé que les TFO seraient également formés au pilotage d’ATP, en plus de conserver leurs fonctions de TFO.
1.17.3.2 Directive du commandement LE-388
En novembre 2019, la YRP a publié une version à jour de la directive du commandement LE-388, Remotely Piloted Aircraft (RPA) Operations Note de bas de page 11. Ce document décrit les rôles et les responsabilités des membres de la YRP en ce qui concerne les opérations avec un ATP, y compris le déploiement d’un ATP ainsi que les mesures à prendre en cas d’incident lié à ces opérations.
Cette directive exige que les pilotes d’ATP exercent leurs activités conformément aux règlements énoncés dans la partie IX du RAC. Lorsqu’elle fait référence à la réglementation, les indications de la directive sont conformes au RAC dans tous les cas sauf un : la définition d’un observateur visuel.
1.17.3.2.1 Observateur visuel
Dans le cas de vols d’ATP effectués sans COAS, comme le vol effectué le jour de l’événement dans le cadre de l’opération de la YRP, le RAC indique ceci : « il est interdit au pilote d’utiliser un système d’aéronef télépiloté à moins que ce dernier ou un observateur visuel ne suive l’aéronef en visibilité directe pendant toute la durée du volNote de bas de page 12 ».
Dans les opérations typiques de la YRP avec un ATP, y compris celles qui ont eu lieu le jour de l’événement, il faut que le pilote, en plus de contrôler et de surveiller l’ATP, commande le système de caméra, ce qui exige que le pilote surveille la transmission vidéo. Par conséquent, les pilotes ne sont pas toujours en mesure de suivre l’ATP en visibilité directe (VLOS) tout au long du vol et doivent avoir l’aide d’un observateur visuel.
Le RAC donne la définition suivante d’un observateur visuel :
observateur visuel Membre d’équipage formé pour aider le pilote à assurer la sécurité du pilotage en visibilité directeNote de bas de page 13
La YRP a choisi de modifier cette définition dans la directive du commandement, et de définir un observateur visuel comme suit [traduction] :
un membre de la YRP ou d’un autre service de police qui maintient le contact visuel avec un ATP pendant les opérations aériennesNote de bas de page 14.
La définition du RAC indique expressément que l’observateur visuel est un membre d’équipage formé, alors que la définition de la directive du commandement ne mentionne pas de formation et exige seulement que l’observateur visuel soit membre d’un service de police.
Bien que la directive du commandement ne mentionne pas la formation d’un observateur visuel, elle stipule que [traduction] « [l]e pilote de l’ATP doit [...] informer l’observateur visuel désigné et s’assurer qu’il est capable d’assumer ses responsabilitésNote de bas de page 15 ». La directive énumère ensuite les responsabilités suivantes de l’observateur visuel [traduction] :
L’observateur visuel (si l’on fait appel à lui) :
(a) se familiarise avec le rôle de l’observateur visuel tel que décrit par le pilote de l’ATP;
(b) maintient une ligne visuelle constante avec l’ATP en vol;
(c) informe immédiatement le pilote de l’ATP de toute question ou préoccupation en matière de sécuritéNote de bas de page 16.
Le RAC ne donne pas de détails sur la formation que doit recevoir un observateur visuel; toutefois, des renseignements et des indications supplémentaires sur la nature de la formation se trouvent dans le Manuel d’information aéronautique de Transports Canada (AIM de TC)Note de bas de page 17, un document à utiliser conjointement avec le RAC. L’AIM de TC donne des précisions sur la réglementation et fournit une certaine interprétation de la façon de se conformer au RAC.
L’AIM de TC donne une description du rôle, y compris l’énoncé suivant :
Les observateurs visuels doivent suivre une formation sur les tâches qui leur sont confiées par le pilote. La formation en question doit traiter des techniques de balayage visuel, de l’identification des aéronefs, des communications et de tout autre facteur pouvant être nécessaire pour que les observateurs visuels accomplissent leurs fonctions dans les règles de l’artNote de bas de page 18.
Le jour de l’événement, le pilote de l’ATP a demandé qu’un autre agent soit un observateur visuel. Bien qu’un agent se trouvant à proximité lui ait répondu, le pilote de l’ATP n’a pas confirmé qui, parmi les agents présents, assumerait ce rôle, et il n’a pas non plus indiqué à l’agent en question en quoi consisteraient ses fonctions ou responsabilités. L’agent ignorait qu’il devait maintenir un contact visuel avec l’ATP.
L’agent qui agissait en tant qu’observateur visuel observait l’écran de télévision pendant la majeure partie du temps où l’ATP était en vol et n’a pas vu ou entendu de trafic aérien, et il ne se souvenait pas d’avoir entendu des appels radio sur la radio VHF portative du pilote de l’ATP.
1.17.3.3 Formation des pilotes et délivrance des certificats pour les aéronefs télépilotés
La YRP a presque exclusivement recours à des programmes de formation disponibles sur le marché pour former ses pilotes d’ATP. Chaque pilote est titulaire d’un certificat de pilote – petit aéronef télépiloté (VLOS) – opérations avancées, délivré par TC, qui lui permet de piloter un ATP dans un espace aérien contrôlé sous réserve de l’autorisation du fournisseur ATS de la région.
1.17.3.4 Liste de vérification du pilote
Pour toutes les opérations de la YRP avec un ATP, les pilotes d’ATP sont tenus d’utiliser la RPAS Pilot Checklist, une liste de vérification d’une page divisée en sections qui correspondent à toutes les phases du vol. Au dos de la page se trouve une liste de numéros de téléphone et de fréquences radio pour leur zone d’opérations. Cette liste de vérification est conservée dans une boîte de rangement, qui est normalement rangée dans le véhicule de déploiement de l’ATP.
Le jour de l’événement, le pilote de l’ATP n’a pas récupéré la liste de vérification dans la boîte de rangement, et il n’a consulté aucune liste de vérification écrite lors des vols précédant l’événement, s’en remettant à sa mémoire pour passer en revue les éléments de la liste. Un de ces éléments est l’examen des lieux, dont les exigences sont énumérées dans le RACNote de bas de page 19. Il n’a pas pu être déterminé si tous les points indiqués dans le RAC ont été passés en revue dans le cadre de l’examen des lieux le jour de l’événement. Par la suite, le pilote de l’ATP s’est appuyé sur les fonctions d’auto-test de l’ATP lui-même pour vérifier si ce dernier était prêt pour le vol.
Dans la 1re section de la RPAS Pilot Checklist, intitulée « Secure Takeoff and Landing Zone (LZ) », les 3 éléments suivants sont énumérés [traduction] :
- Selon l’examen des lieux, déterminer la LZ [zone d’atterrissage] et fermer la LZ. […]
- Faire un exposé à l’équipage sur les opérations aériennes, le plan d’urgence ainsi que l’emplacement et l’utilisation de l’équipement.
- Vérifier l’espace aérien et déposer une demande d’autorisation de vol, au besoinNote de bas de page 20.
Le 2e élément semble faire référence à l’observateur visuel, bien que ce ne soit pas clairement indiqué. Aucun élément de la liste de vérification n’incite le pilote d’un ATP à choisir ou à désigner un observateur visuel avant ou pendant le vol; toutefois, les sections ultérieures de la liste de vérification font référence à un observateur visuel. Le 3e élément de cette section rappelle aux pilotes de déposer une demande d’autorisation de vol, au besoin, à l’aide de l’application NAV Drone.
La 2e section de la liste de vérification, intitulée « Pre-Flight », porte sur l’assemblage et l’inspection de l’ATP, ainsi que sur sa mise sous tension. Le dernier élément de cette section donne cette instruction aux pilotes [traduction] :
« Confirmer que l’ATP/le contrôleur est déverrouillé pour les vols dans tous les espaces aériensNote de bas de page 21. »
Lors d’une tentative de vol près d’un aéroport ou dans une zone contrôlée, comme une trajectoire de décollage ou d’approche d’un aéroport, les messages à l’écran du contrôleur de l’ATP exigent normalement que les pilotes indiquent qu’ils ont reçu l’autorisation pour le vol avant que l’ATP puisse être utilisé; cependant, la YRP a demandé que DJI déverrouille ses ATP pour faciliter l’utilisation des ATP au cours des activités policièresNote de bas de page 22. Cette demande a été acceptée et, par conséquent, le logiciel de l’ATP de la YRP ne demande pas que le pilote ait reçu l’autorisation et qu’il confirme l’avoir obtenue avant que l’ATP ne soit autorisé à décoller dans un espace aérien contrôléNote de bas de page 23,Note de bas de page 24.
La 4e section de la liste de vérification contient 3 éléments pour la phase aérienne du vol (appelée la phase « Operation »), liés au suivi de l’ATP en visibilité directe par le pilote ou l’observateur visuel [traduction] :
- Maintenir la VLOS.
- Le pilote annonce ses intentions à l’observateur visuel; l’observateur visuel doit les confirmer.
- Maintenir la communication entre le pilote, l’observateur visuel et les autres aéronefs, au besoinNote de bas de page 25.
Cette section de la liste de vérification présume qu’un observateur visuel est présent, et ne propose pas de mesures à prendre dans le cas où l’on ne fait appel à un observateur.
1.18 Renseignements supplémentaires
1.18.1 Évitement des collisions et balayage visuel
Le principe « voir et éviter » constitue la méthode de base d’évitement des collisions en vol VFR, méthode fondée sur un balayage visuel actif de même que sur la capacité de détecter des aéronefs en conflit et de prendre les mesures qui s’imposent pour les éviter. La méthode a été examinée dans le cadre d’un certain nombre d’autres enquêtes du BSTNote de bas de page 26, et le BST a déterminé qu’étant donné ses limites, le principe « voir et éviter » ne doit pas être le seul moyen utilisé pour prévenir les collisions d’aéronefs qui volent en VFR.
Un document de recherche publié en 1991 par l’Australian Transport Safety Bureau décrit certaines des limites du principe « voir et éviter ». Ces limites ont été étudiées en ce qui concerne la détection des aéronefs habités, qui sont beaucoup plus grands que l’ATP à l’étude. Le document de recherche en question contient les énoncés suivants [traduction] :
En raison des limites physiologiques de l’œil humain, même une surveillance visuelle des plus consciencieuses ne permettra pas toujours de repérer d’autres aéronefs. […]
Il est peu probable qu’un objet dont la taille est sous le seuil d’acuité visuelle soit repéré, et encore moins probable qu’il soit reconnu comme un aéronef qui s’approche. […]
L’œil humain détecte mieux les cibles mobiles que les cibles stationnaires; en revanche, dans la plupart des cas, un aéronef sur une trajectoire de collision se présente comme une cible stationnaire dans le champ visuel du pilote. […]
[L]es arrière-plans complexes, tels que le paysage terrestre ou les nuages, créent une « interaction de contour », effet visuel qui réduit la capacité de reconnaître facilement un aéronef. Cela se produit lorsque les contours de l’arrière-plan se confondent avec la forme de l’aéronef pour produire une image moins netteNote de bas de page 27.
1.18.2 Saturation des tâches
La saturation des tâches est la situation où le nombre de tâches exigées d’une personne dépasse sa capacité à les accomplir à un niveau acceptable. Les personnes qui sont saturées de tâches sont incapables d’accepter des tâches supplémentaires et ne seront probablement pas en mesure d’exécuter les tâches du moment à un niveau élevé. Une personne qui est saturée de tâches peut adopter ce que l’on appelle une vision tubulaire, c’est-à-dire qu’elle se concentre sur une tâche précise en excluant les autres.
1.18.2.1 Tâches requises pour le pilotage d’un aéronef télépiloté
Les ATP sont normalement contrôlés à l’aide d’un contrôleur portatif, qui contrôle l’ATP par liaison ou signal radio. La plupart des ATP disponibles sur le marché sont équipés d’une caméra intégrée ou permettent aux utilisateurs de choisir leur propre caméra en fonction de leurs besoins. Le pilote est en mesure de voir les images de la caméra sur un écran (également appelé dispositif de vue à la première personne). Ce dispositif fournit normalement des données télémétriques utiles telles que l’altitude de l’ATP et l’autonomie restante de la batterie. Il peut soit faire partie du contrôleur, soit être un dispositif doté d’un écran (un téléphone intelligent dans certains cas), qui peut être branché au contrôleur.
Bien que de nombreux ATP soient dotés de capteurs et de bases de données GPS (système de positionnement mondial) sur les obstacles pour mieux éviter les collisions et bien que, dans certains cas, ils fournissent des avertissements sur le trafic aérien, ils ne suppriment pas l’obligation qu’a le pilote de l’ATP, de concert avec un observateur visuel au besoin, d’éviter les collisions avec des objets, des personnes ou d’autres aéronefs.
Pour certains types d’opérations avec un ATP, comme l’opération de la YRP, les pilotes utilisent le dispositif de vue à la première personne pendant la majeure partie du vol plutôt que de voler en observant directement la position de leur machine dans le ciel. Comme le pilote ne peut pas suivre l’ATP en visibilité directe pendant ce type d’opération, on fait appel à des observateurs visuels.
Bien que la présence d’un observateur visuel réduise la charge de travail du pilote d’ATP en le libérant de l’obligation de garder l’appareil en vue, il reste habituellement que le pilote doit encore accomplir de nombreuses autres tâches, ce qui peut entraîner une charge de travail élevée. En effet, le pilote de l’ATP commande simultanément un aéronef et un système de caméra à l’aide du dispositif de vue à la première personne.
Pendant le vol à l’étude, alors que l’objectif était de fournir une vue d’ensemble des lieux à des collègues de l’équipe tactique au sol, le pilote de l’ATP était responsable des tâches suivantes :
- contrôler l’ATP;
- surveiller la transmission vidéo de l’ATP;
- surveiller les communications sur sa radio de police, y compris les communications entre les personnes participant activement à l’opération;
- surveiller une radio VHF portative (en portant attention aux diffusions des avions);
- surveiller les discussions et répondre aux questions des membres de la YRP qui regardaient la transmission vidéo;
- maintenir la communication avec l’observateur visuel (conformément aux directives de la YRP).
Le pilote de l’ATP ne se souvient pas d’avoir entendu une transmission sur la radio VHF pendant l’un ou l’autre des vols de l’ATP, et il n’a pas entendu le bruit du Cessna qui s’approchait avant la collision. Bien qu’il ait recruté un observateur visuel, il ne se souvient d’aucune communication continue avec cette personne pendant les vols.
2.0 Analyse
Les pilotes de l’aéronef télépiloté (ATP) et du Cessna 172N (Cessna) possédaient les licences et les certificats appropriés pour effectuer leurs vols prévus respectifs. Rien n’indique que des facteurs médicaux ou la fatigue aient nui à leur rendement. De plus, le jour de l’événement, les conditions météorologiques étaient propices au vol selon les règles de vol à vue (VFR).
L’analyse cherchera à expliquer pourquoi les efforts déployés par l’équipage de conduite du Cessna pour le balayage visuel et l’évitement des collisions ont été infructueux, quelles procédures étaient en place à la police régionale de York (YRP) pour les opérations avec un ATP et pourquoi le pilote de l’ATP et l’observateur visuel n’ont pas reconnu le conflit avant que la collision ne se produise.
2.1 Évitement des collisions et balayage visuel
Les pilotes à bord du Cessna suivaient les procédures de circuit établies et effectuaient une approche selon le profil d’approche finale normalisé vers la piste 15. Pour éviter les conflits avec les autres aéronefs à proximité, ils diffusaient leur position sur la fréquence obligatoire de l’aéroport et surveillaient la fréquence pour détecter les transmissions d’autres aéronefs. Les pilotes n’ont pas entendu d’autres aéronefs sur la fréquence et n’étaient pas conscients de la présence d’autres aéronefs dans la région.
En plus de surveiller la fréquence, les pilotes du Cessna appliquaient le principe « voir et éviter » pendant qu’ils effectuaient le circuit, et ils faisaient un balayage visuel actif de la zone. Lorsque les 2 aéronefs sont arrivés à proximité l’un de l’autre, l’ATP se trouvait directement devant le Cessna, qui descendait en approche finale. Ainsi, l’ATP, qui était relativement petit, aurait été presque immobile vu à partir du poste de pilotage du Cessna, dans un paysage complexe de bâtiments urbains et de caractéristiques du terrain. La petite taille de l’ATP en faisait peut-être un repère visuel inférieur au seuil d’acuité visuelle des yeux des pilotes du Cessna, et l’absence de contour d’arrière-plan entre l’ATP noir et le paysage urbain aurait rendu l’ATP très difficile à voir, même si l’équipage de conduite avait été conscient de sa présence.
Fait établi quant aux causes et aux facteurs contributifs
L’équipage de conduite du Cessna 172N n’était pas conscient de la présence d’un ATP en vol dans les environs et, en raison de plusieurs facteurs, le balayage visuel actif qui fait partie du principe « voir et éviter » n’a pas permis de repérer le conflit.
2.2 Opérations avec un aéronef télépiloté à la police régionale de York
La directive du commandement de la YRP pour les opérations avec un ATP stipule que tous les pilotes d’ATP doivent suivre les règlements prescrits à la partie IX du Règlement de l’aviation canadien (RAC) et décrit les rôles et les responsabilités des membres de la YRP ainsi que la liste de vérification à utiliser pendant les opérations avec un ATP.
2.2.1 Utilisation de la liste de vérification
Dans chaque opération avec un ATP, les pilotes d’ATP de la YRP sont tenus d’utiliser la RPAS Pilot Checklist, et une copie de la liste de vérification est normalement rangée dans chaque véhicule de déploiement d’ATP. Le jour de l’événement, le pilote de l’ATP n’a pas consulté la liste de vérification qui se trouvait dans son véhicule, mais a plutôt choisi de passer en venue de mémoire les éléments de la liste de vérification.
Fait établi quant aux risques
Si les pilotes ne consultent pas les listes de vérification établies avant et pendant les opérations aériennes, il y a un risque que des éléments de la liste de vérification jugés critiques pour la sécurité du vol soient omis.
2.2.2 Observateur visuel
Le 2e élément de la première section de la RPAS Pilot Checklist donne aux pilotes l’instruction de [traduction] « Faire un exposé à l’équipage sur les opérations aériennes ». Bien que cette instruction n’indique pas explicitement qu’un exposé doit être fait à l’observateur visuel, il est implicite que ce membre d’équipage est inclus. Les opérations avec un ATP à la YRP requièrent un observateur visuel, car le pilote de l’ATP est occupé à commander la caméra et ne peut pas suivre l’ATP en visibilité directe (VLOS) tel que l’exige la réglementation.
La directive du commandement de la YRP contient des indications de base à l’intention des observateurs visuels, leur demandant de se familiariser avec le rôle d’observateur visuel tel que décrit par les pilotes d’ATP, de suivre les ATP en vol en visibilité directe et d’informer les pilotes d’ATP de tout problème ou de toute préoccupation. Le jour de l’événement, alors que l’ATP était déjà en vol, le pilote de l’ATP a demandé au groupe de policiers qui se tenait à proximité que quelqu’un surveille l’ATP pendant le vol, et l’un des policiers à proximité lui a répondu. Cependant, le pilote de l’ATP n’a pas fait d’exposé à cet agent et ne lui a pas expliqué les tâches ou responsabilités que cela exigeait.
La définition d’un observateur visuel qui se trouve dans la directive du commandement de la YRP diffère de celle qui se trouve dans le RAC. La définition du RAC indique expressément que l’observateur visuel est un membre d’équipage formé, alors que la définition de la directive du commandement ne mentionne pas la formation et exige seulement que l’observateur visuel soit membre d’un service de police. Bien que les responsabilités générales de l’observateur visuel soient énumérées dans la directive, les membres de la YRP qui ne sont pas fréquemment associés à des opérations avec un ATP peuvent ne pas connaître les directives, et sans la formation requise par la réglementation ou un exposé fourni par l’utilisateur de l’ATP, ils peuvent ne pas comprendre suffisamment leur rôle ou ne pas avoir les compétences nécessaires pour être efficaces.
Lors de l’événement à l’étude, dans les moments qui ont précédé la collision, l’observateur visuel choisi regardait l’écran de télévision au lieu de suivre l’ATP en visibilité directe.
Fait établi quant aux causes et aux facteurs contributifs
La politique de la YRP n’exige pas que les observateurs visuels soient des membres d’équipage formés, et le pilote de l’ATP n’a pas informé l’observateur visuel de son rôle et de ses responsabilités avant l’opération. Par conséquent, l’observateur visuel ignorait qu’il devait suivre l’ATP en visibilité directe, et il n’était pas formé aux techniques de balayage visuel ni au repérage d’aéronefs.
2.2.3 Autorisation des opérations dans un espace aérien contrôlé
Le 3e élément de la première section de la RPAS Pilot Checklist donne aux pilotes l’instruction de déposer une demande d’autorisation de vol lorsque cela est nécessaire. Le pilote de l’ATP à l’étude savait que l’opération du jour de l’événement se déroulerait dans la zone de contrôle de l’aéroport municipal de Toronto/Buttonville (CYKZ) et qu’elle nécessiterait donc une autorisation des services de la circulation aérienne (ATS).
En raison de la nature de l’opération policière en cours, qui concernait un individu potentiellement armé, le pilote de l’ATP ressentait un besoin urgent de faire décoller l’ATP le plus rapidement possible. De plus, le pilote de l’ATP n’avait vu aucun trafic dans la zone pendant la préparation de l’ATP et n’avait entendu aucune transmission récente sur la radio très haute fréquence (VHF) portative. Par conséquent, le pilote de l’ATP a décidé de ne pas demander d’autorisation pour ce vol afin de fournir plus rapidement des images à ses collègues, qui attendaient à proximité.
Comme plusieurs variables entrent en ligne de compte dans chaque autorisation, il n’a pas été possible de déterminer si l’autorisation aurait été accordée par l’ATS si elle avait été demandée.
Fait établi quant aux risques
Si les utilisateurs d’ATP qui prévoient d’exercer leurs activités dans un espace aérien contrôlé ne communiquent pas leurs intentions de vol au fournisseur ATS et ne reçoivent pas son autorisation, il existe un risque accru de conflit ou de collision avec un autre aéronef.
2.2.4 Saturation des tâches
À la YRP, le rôle de pilote d’ATP autant que celui d’agent de vol tactique (TFO) comprend l’utilisation d’un système d’imagerie aérienne, y compris la communication avec ceux qui utilisent les images à l’appui d’une activité policière en cours. Pour devenir pilotes d’ATP, les TFO doivent avoir reçu une formation au pilotage d’un ATP et avoir obtenu leur certificat de pilote pour les opérations avancées de petits ATP.
La saturation des tâches est la situation où le nombre de tâches exigées d’une personne dépasse sa capacité à les accomplir à un niveau acceptable; elle est incapable d’accepter des tâches supplémentaires et peut adopter une vision tubulaire, ce qui l’amène à se concentrer uniquement sur une tâche précise en excluant les autres.
Les pilotes d’ATP à la YRP doivent remplir toutes les fonctions de TFO en plus de piloter un ATP. Dans l’événement à l’étude, cette combinaison a donné lieu à une situation dans laquelle le pilote de l’ATP gérait de nombreuses communications différentes, comme la radio de la police, une radio VHF pour les diffusions des avions, ainsi que les questions des membres de la YRP. En outre, il contrôlait et surveillait la position de l’ATP sur le dispositif de vue à la première personne et s’assurait que la caméra captait les images requises. L’exécution simultanée d’un tel nombre de tâches peut souvent conduire à la saturation des tâches et a probablement nui à la capacité du pilote de l’ATP à traiter les renseignements.
Faits établis quant aux causes et aux facteurs contributifs
Le pilote de l’ATP était chargé de commander le système de caméra, de surveiller l’état de l’ATP et de communiquer sur plusieurs canaux. En conséquence, il a probablement été saturé par ses tâches, ce qui a limité sa capacité à surveiller visuellement l’ATP et à entendre les appels radio sur la fréquence obligatoire de la zone de contrôle et le bruit des aéronefs en approche avant la collision.
Dans les instants précédant la collision, le pilote de l’ATP était probablement saturé par ses tâches, l’observateur visuel ignorait qu’il devait maintenir la visibilité directe, et le balayage visuel actif par les pilotes du Cessna a été infructueux; par conséquent, le conflit n’a pas été repéré et les 2 aéronefs sont entrés en collision.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- L’équipage de conduite du Cessna 172N n’était pas conscient de la présence d’un aéronef télépiloté en vol dans les environs et, en raison de plusieurs facteurs, le balayage visuel actif qui fait partie du principe « voir et éviter » n’a pas permis de repérer le conflit.
- La politique de la police régionale de York n’exige pas que les observateurs visuels soient des membres d’équipage formés, et le pilote de l’aéronef télépiloté n’a pas informé l’observateur visuel de son rôle et de ses responsabilités avant l’opération. Par conséquent, l’observateur visuel ignorait qu’il devait suivre l’aéronef télépiloté en visibilité directe, et il n’était pas formé aux techniques de balayage visuel ni au repérage d’aéronefs.
- Le pilote de l’aéronef télépiloté était chargé de commander le système de caméra, de surveiller l’état de l’aéronef télépiloté et de communiquer sur plusieurs canaux. En conséquence, il a probablement été saturé par ses tâches, ce qui a limité sa capacité à surveiller visuellement l’aéronef télépiloté et à entendre les appels radio sur la fréquence obligatoire de la zone de contrôle et le bruit des aéronefs en approche avant la collision.
- Dans les instants précédant la collision, le pilote de l’aéronef télépiloté était probablement saturé par ses tâches, l’observateur visuel ignorait qu’il devait maintenir la visibilité directe, et le balayage visuel actif par les pilotes du Cessna a été infructueux; par conséquent, le conflit n’a pas été repéré et les 2 aéronefs sont entrés en collision.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les pilotes ne consultent pas les listes de vérification établies avant et pendant les opérations aériennes, il y a un risque que des éléments de la liste de vérification jugés critiques pour la sécurité du vol soient omis.
- Si les utilisateurs d’aéronefs télépilotés qui prévoient d’exercer leurs activités dans un espace aérien contrôlé ne communiquent pas leurs intentions de vol au fournisseur de services de la circulation aérienne et ne reçoivent pas son autorisation, il existe un risque accru de conflit ou de collision avec un autre aéronef.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Police régionale de York
La police régionale de York a modifié sa directive du commandement LE-388 pour y ajouter un outil d’évaluation des risques avant le vol et une liste de vérification mise à jour à l’intention des pilotes d’aéronefs télépilotés. Il y a également des indications supplémentaires concernant le rôle d’observateur visuel, y compris une fiche de référence rapide décrivant ses rôles et ses responsabilités, ainsi que l’obligation qu’un observateur visuel soit présent pour tous les vols opérationnels d’aéronefs télépilotés.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Le rapport a été officiellement publié le .
Annexes
Annexe A – Exemple de carte du système GEO de DJI pour l’aéroport de Buttonville indiquant les zones de restrictions
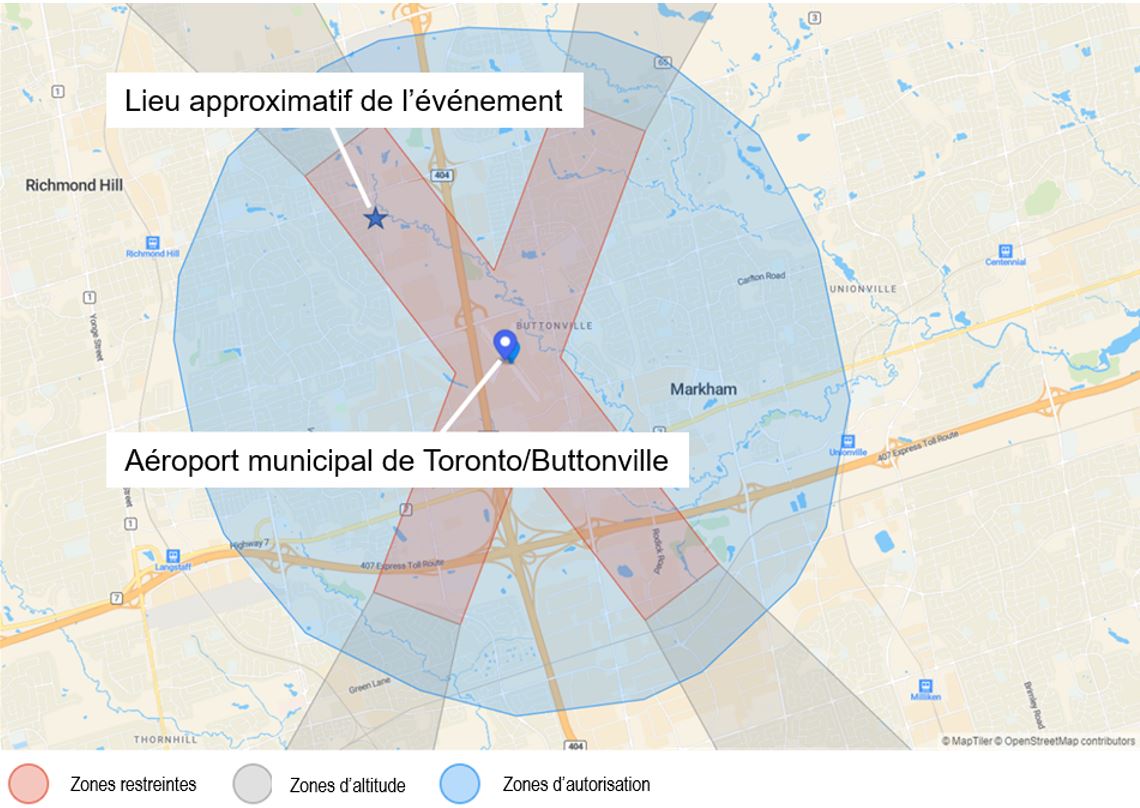
DJI, carte des zones GEO – Fly Safe, avec annotations du BST