Beechcraft Bonanza V35B, N3804X
Senneterre (Québec), 7 NM NE
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 29 juillet 2019, à 15 h 55, heure avancée de l’Est, l’aéronef Beechcraft Bonanza V35B (immatriculation N3804X, numéro de série D-10358) a décollé de l’aéroport régional de Wittman, au Wisconsin (États-Unis), pour un vol de jour selon les règles de vol à vue à destination de l’aéroport municipal de Danbury, au Connecticut (États-Unis), avec seulement le pilote à bord. Peu après le décollage, l’aéronef a commencé à dévier de la trajectoire prévue vers le nord et, par la suite, est entré dans l’espace aérien canadien. À 19 h 12, alors qu’il se trouvait près d’un front d’averses de pluie, d’orages et d’éclairs, l’aéronef a effectué un virage à droite, il est descendu rapidement et a percuté le relief à environ 7 milles marins au nord-est de Senneterre (Québec).
À 23 h 31, le Centre conjoint de coordination de sauvetage de Trenton (Ontario) a été avisé qu’un aéronef avait disparu et a entrepris des opérations de recherche et de sauvetage. Le lieu de l’accident a été découvert 4 jours plus tard, le 2 août 2019. Le pilote a été mortellement blessé. L’aéronef a été détruit. Aucun incendie ne s’est déclaré après l’impact. Aucun signal provenant de la radiobalise de repérage d’urgence de l’aéronef n’a été capté.
1.0 Renseignements de base
1.1 Déroulement du vol
À 15 h 55 Note de bas de page 1, le 29 juillet 2019, l’aéronef Beechcraft Bonanza V35B (immatriculation américaine N3804X, numéro de série D-10358) a décollé de l’aéroport régional de Wittman (KOSH), au Wisconsin (États-Unis), pour un vol de jour selon les règles de vol à vue (VFR) à destination de l’aéroport municipal de Danbury (KDXR), au Connecticut (États-Unis), avec seulement le pilote à bord. Dans les minutes qui ont suivi, l’aéronef a effectué un virage à environ 15° au nord d’une trajectoire de vol directe vers KDXR Note de bas de page 2. À 16 h 10, l’aéronef a franchi 10 000 pieds au-dessus du niveau de la mer (ASL) en montée et s’est stabilisé à environ 11 500 pieds ASL. Durant le vol, l’aéronef déviait vers le nord et n’a jamais retrouvé une trajectoire ou un cap vers la destination d’origine (figure 1).
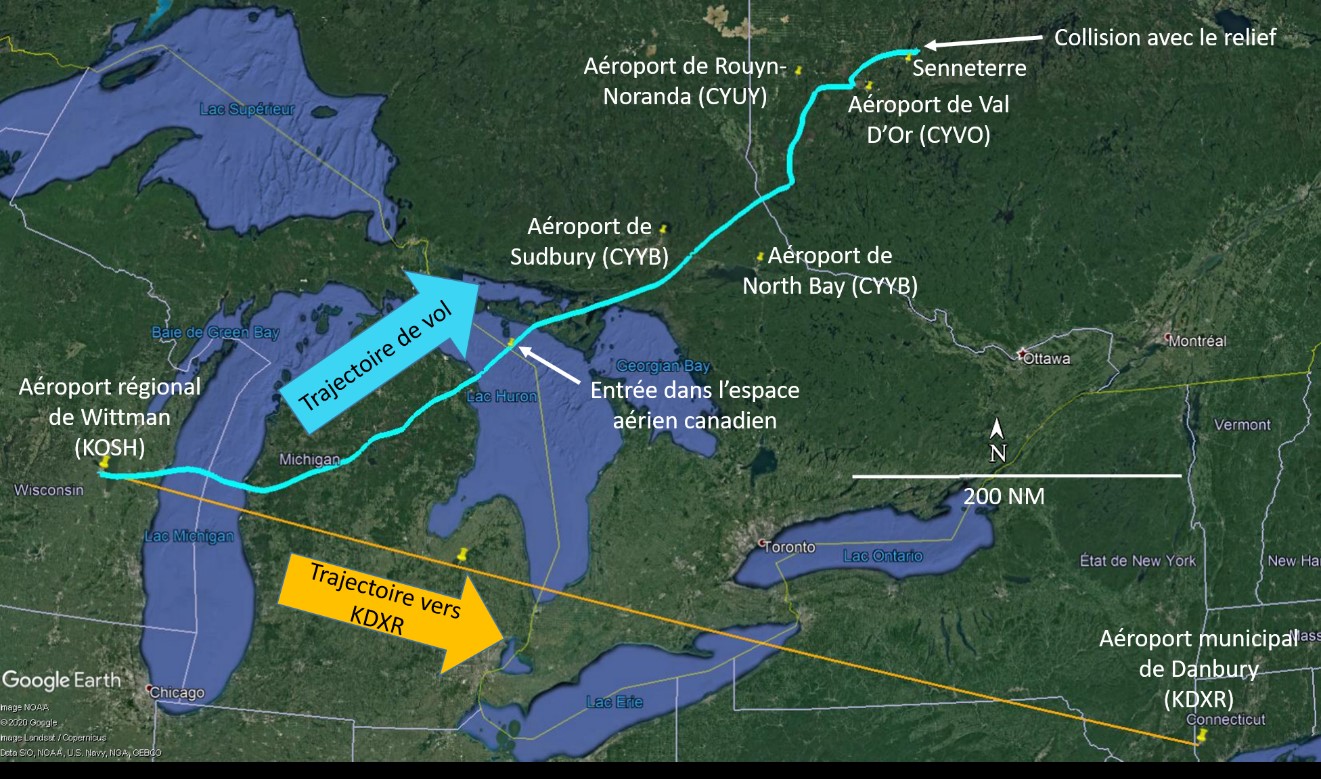
À 17 h 27, juste avant d’entrer dans l’espace aérien canadien, le pilote a communiqué avec le Centre de contrôle régional (ACC) de Toronto et a indiqué au contrôleur que, dans 20 milles marins (NM), il effectuerait un virage à 90° vers la droite pour reprendre sa trajectoire vers KDXR. Le contrôleur de l’ACC de Toronto a répondu qu’un front solide d’orages et d’éclairs était visible sur le radar, et qu’il ne pouvait fournir aucune indication sur la meilleure route à prendre. Le pilote a accusé réception des renseignements météorologiques et a déclaré qu’il avait les données radar météo sous les yeux. Après avoir atteint la rive nord du lac Huron, en Ontario, l’aéronef a tourné vers le nord-nord-est et est passé entre 2 aéroports canadiens : l’aéroport de Sudbury (CYSB) (Ontario), à environ 20 NM à sa gauche, et l’aéroport de North Bay (CYYB) (Ontario), à environ 30 NM à sa droite.
À 18 h 24, le pilote a amorcé une descente à partir d’une altitude de 11 500 pieds ASL et, 4 minutes plus tard, l’aéronef est passé au-dessous de 10 000 pieds ASL. À 18 h 37, alors que l’aéronef survolait la province de Québec, le contrôleur de l’ACC de Toronto a informé le pilote que les services radar prenaient fin et lui a donné pour instruction de communiquer avec l’ACC de Montréal.
À 18 h 42, l’aéronef était descendu à 7500 pieds ASL et le pilote a communiqué avec l’ACC de Montréal. Comme d’autres aéronefs volaient dans la région, le contrôleur a demandé au pilote s’il était familier avec les aéroports de Rouyn-Noranda (CYUY) ou de Val-d’Or (CYVO), tous 2 situés au Québec, qui étaient à proximité. Le pilote a répondu qu’il ne les connaissait pas.
Les communications radio entre le pilote et le contrôleur de l’ACC de Montréal étaient limitées et n’ont révélé aucun signe indiquant que le pilote était en détresse. En raison des limites de la couverture radar au-dessous de 8000 pieds ASL dans la zone, le contrôleur n’a pas pu maintenir le contact radar avec l’aéronef à l’étude. Par conséquent, à 18 h 44, le contrôleur de l’ACC de Montréal a fourni le calage altimétrique pour CYVO, puis a autorisé le pilote à passer à une fréquence en route. Le pilote a répondu en répétant le calage altimétrique pour CYVO. Il n’y a pas eu d’autres transmissions de la part du pilote.
Vers 19 h 06, l’avion a survolé Senneterre (Québec), à une altitude de 7000 pieds ASL. Environ 3 minutes plus tard, l’aéronef a franchi 7500 pieds ASL dans une montée graduelle. À ce moment, l’aéronef volait à une vitesse corrigée (KCAS) de 160 nœuds Note de bas de page 3, en direction est. L’aéronef a ensuite amorcé un virage lent vers la gauche à 1,45° par seconde pendant environ 75 secondes, qui s’est accentué à 4,36° par seconde pendant 33 secondes de plus. À 19 h 10, le virage à gauche s’est poursuivi en descente, et la descente vers la gauche a continué jusqu’à ce que l’aéronef atteigne 7200 pieds ASL.
Après avoir viré à environ 250° vers la gauche, l’aéronef a immédiatement amorcé un virage ascendant à droite et sa vitesse a diminué à environ 100 KCAS alors qu’il remontait jusqu’à environ 7900 pieds ASL. Pendant que le virage à droite se poursuivait, l’aéronef a commencé à descendre, le virage à droite s’est accentué et la vitesse et le taux de descente de l’aéronef ont augmenté rapidement. À 19 h 12, l’aéronef a percuté le relief dans une zone fortement boisée, à environ 7 NM au nord-est de Senneterre, à 452 NM de KDXR.
Plus tard ce soir-là, peu après l’heure d’arrivée prévue de l’aéronef à KDXR, la famille du pilote a signalé l’aéronef disparu aux autorités américaines. Les autorités américaines ont alors communiqué avec les services canadiens de contrôle du trafic aérien (ATC). À 23 h 31, le Centre conjoint de coordination de sauvetage (JRCC) de Trenton (Ontario) a été avisé que l’aéronef avait disparu et a entrepris des opérations de recherche et de sauvetage (SAR). Le lieu de l’accident a été localisé 4 jours plus tard, le 2 août 2019. Aucun signal de radiobalise de repérage d’urgence (ELT) n’a été détecté immédiatement après l’accident ou pendant les recherches.
1.2 Tués et blessés
Le pilote a été mortellement blessé.
1.3 Dommages à l’aéronef
L’aéronef a été détruit sous la force de l’impact. Aucun incendie ne s’est déclaré après l’impact.
1.4 Autres dommages
En raison du temps écoulé entre l’accident et l’arrivée du personnel de recherche et de sauvetage, l’enquête n’a pas permis de déterminer la présence ou la quantité de carburant déversé.
1.5 Renseignements sur le personnel
Le pilote possédait les licences et les qualifications requises pour effectuer le vol, conformément à la réglementation en vigueur de la Federal Aviation Administration (FAA) des États-Unis. Il a obtenu un certificat de pilote de la FAA (pilote privé, avion terrestre monomoteur) en 1999 et une qualification de vol aux instruments en 2001. Les dossiers de la FAA montrent que son dernier examen médical a été effectué en 2016 et qu’une liste de vérification d’examen médical complet BasicMed a été remplie en 2018.
Le pilote avait 20 ans d’expérience comme pilote d’aviation générale et volait de 100 à 150 heures par année environ. L’enquête n’a pas permis de récupérer le carnet de vol du pilote et il a donc été impossible de déterminer le total des heures de vol, les heures de vol sur type ou l’expérience de vol aux instruments du pilote.
Le pilote était membre de l’American Bonanza Society et les dossiers indiquent qu’il avait réussi le cours Approved Bonanza Recurrent Course Note de bas de page 4 de Beechcraft Pilot Proficiency Program, Inc. en mai 2007.
1.6 Renseignements sur l’aéronef
1.6.1 Généralités

L’aéronef Beechcraft Bonanza a été fabriqué par la Beech Aircraft Corporation de Wichita, au Kansas (États-Unis). Le modèle 35 Bonanza est un monoplan monomoteur à aile basse avec train d’atterrissage rétractable. Il se distingue par son empennage papillon, ou empennage en V Note de bas de page 5, qui combine les gouvernes de profondeur et de direction. L’aéronef à l’étude (figure 2) était un modèle Bonanza V35B, fabriqué en 1980. Le pilote dans l’événement à l’étude avait acheté l’aéronef en 2001.
Les dossiers indiquent que l’aéronef était homologué, équipé et entretenu conformément à la réglementation en vigueur et aux procédures approuvées. La dernière inspection annuelle avait été effectuée le 28 septembre 2018.
| Fabricant | Beech Aircraft Corporation |
|---|---|
| Type, modèle et immatriculation | Bonanza, V35B, N3804X |
| Année de construction | 1980 |
| Numéro de série | D-10358 |
| Date d’émission du certificat de navigabilité | 13 novembre 1980 |
| Total d’heures de vol cellule | 3742,47 (au 28 septembre 2018) |
| Type de moteur (nombre de moteurs) | Teledyne Continental Motors, IO-520-BB, SN285789-R (1) |
| Type d’hélice ou de rotor (nombre) | Hartzell, tripale, PHC-C3YF-1RF (1) |
| Masse maximale autorisée au décollage | 3400 lb / 1542 kg |
| Type(s) de carburant recommandé(s) | Essence aviation 100/100LL |
| Type de carburant utilisé | Essence aviation 100LL |
1.6.2 Distance franchissable et autonomie
Les caractéristiques de distance franchissable et d’autonomie maximales de l’aéronef sont publiées dans le manuel d’utilisation du pilote (POH) du Beechcraft Bonanza V35B. Le graphique de performance pour la distance franchissable Note de bas de page 6 montre que la distance franchissable par l’aéronef peut varier entre 690 et 890 NM, en fonction de facteurs comme les conditions environnementales, la charge de l’aéronef et la charge de carburant, les réglages de puissance du moteur et les altitudes de vol. Le graphique de performance pour l’autonomie Note de bas de page 7 indique que le temps en vol peut varier entre 4 heures 54 minutes et 6 heures 27 minutes. On a signalé que les réservoirs de carburant de l’aéronef avait été remplis avant le vol à l’étude.
La distance entre KOSH et KDXR est de 684 NM. Le 14 juillet 2019, le pilote avait parcouru cette distance en environ 5 heures. Le jour de l’événement, le pilote a volé sur une distance d’environ 610 NM en 3 heures 17 minutes. Les calculs de performance estiment le temps de vol restant disponible à entre 1 heure 37 minutes et 3 heures 28 minutes. L’enquête a permis de conclure qu’il est peu probable que l’aéronef se soit trouvé à court de carburant.
1.6.3 Équipement de l’aéronef
L’aéronef était équipé d’un système de pilotage automatique Bendix/King KFC 200, d’un système combiné de gestion de vol (FMS)/positionnement mondial (GPS)/navigation (NAV)/communication (COM) à écran tactile Avidyne IFD540, d’un Garmin GPSMAP 396, d’un transpondeur Garmin GTX-330ES (squitter long) et d’un récepteur de surveillance dépendante automatique en mode diffusion (ADS-B) Note de bas de page 8 Appareo Aviation Stratus. Le pilote avait également un ordinateur portatif et une tablette, qui utilisaient l’application de vol en ligne ForeFlight pour la planification et le suivi de vol.
L’enquête n’a pas permis de déterminer si le système de pilotage automatique a été utilisé au cours du vol. Il est probable que le pilote a utilisé l’application ForeFlight conjointement avec le système Avidyne IFD540 à des fins de navigation en vol, y compris l’évitement des conditions météorologiques pendant le vol, mais l’enquête n’a pas permis de déterminer dans quelle mesure. Même si le transpondeur et le récepteur ADS-B peuvent tirer parti de la technologie ADS-B, l’aéronef ne disposait pas d’une diversité d’antennes suffisante Note de bas de page 9 pour être pleinement compatible avec le réseau ADS-B de NAV CANADA/Aireon.
Le récepteur ADS-B Stratus pouvait recevoir des renseignements météorologiques lorsqu’il communiquait avec le réseau ADS-B au sol. Toutefois, ce service n’est offert qu’aux États-Unis. Les guides du pilote pour la plupart des récepteurs Stratus disponibles précisent cette limite Note de bas de page 10, Note de bas de page 11, Note de bas de page 12, Note de bas de page 13. Par contre, il a été impossible de déterminer si le pilote la connaissait.
1.6.4 Caractéristiques du Beechcraft Bonanza en piqué en spirale
Un piqué en spirale est un virage serré en descente raide alors que l’assiette en piqué de l’appareil est très accentuée. Un piqué en spirale est caractérisé par un angle d’inclinaison excessif, une augmentation rapide de la vitesse et du taux de descente, et une augmentation des facteurs de charge.
Le cours Approved Bonanza Recurrent Course de Beechcraft Pilot Proficiency Program, Inc. comprend une démonstration des caractéristiques de spirale de l’aéronef, la technique de récupération et la pratique de cette technique par l’étudiant. La démonstration du piqué en spirale est expliquée dans un document et ce dernier fournit les renseignements suivants [traduction] :
La démonstration du piqué en spirale montre le résultat probable si l’aéronef adopte une assiette fortement inclinée, mais que le pilote ne maintient pas l’altitude et la vitesse. Les spirales sont en général le résultat d’une désorientation, d’une défaillance de l’altimètre, de fortes turbulences ou d’un orage, ou encore d’un manque d’attention, surtout dans les conditions de vol aux instruments. Elles sont le résultat naturel d’un avion qui est stable en tangage, mais de stabilité neutre ou instable en roulis. Les aéronefs à piston Beech ont cette caractéristique. […]
Maintenant, inclinez l’avion en un fort roulis et lâchez les commandes. L’aéronef commencera immédiatement à accélérer et à descendre, avec une vitesse vraie et une vitesse verticale qui augmentent rapidement. Il n’a pas tendance à se rétablir, mais tente plutôt de revenir à la vitesse commandée en se cabrant. Cela resserre simplement la spirale et augmente le facteur de chargeNote de bas de page 14.
1.7 Renseignements météorologiques
1.7.1 Généralités
L’enquête n’a pas permis de déterminer si le pilote avait obtenu des renseignements météorologiques avant son départ ou, le cas échéant, quels renseignements il avait obtenus. Cependant, au moment du départ, les conditions météorologiques à KOSH étaient propices au vol VFR.
Une analyse météorologique Note de bas de page 15 de la région et du jour de l’accident a permis de déterminer qu’un front irrégulier d’averses et d’orages s’étendait du Michigan au centre de l’Ontario et à l’ouest du Québec, et se déplaçait vers l’est à une vitesse d’environ 25 à 30 nœuds. L’analyse a permis de conclure que près des orages et des fortes averses, la visibilité chutait à 1½ mille terrestre (SM) et le plafond chutait à 700 pieds au-dessus du niveau du sol (AGL). L’aéronef a longé le front d’averses et d’orages (figure 3).

1.7.2 Conditions météorologiques près du lieu de l’accident
Les orages ont atteint CYUY vers 16 h et CYVO vers 17 h 45. À 18 h 45, l’aéronef se trouvait à l’est de CYUY et volait vers CYVO à 7500 pieds ASL. Les orages ont atteint le lieu de l’accident vers 18 h 50. À 19 h, l’aéronef se trouvait à environ 20 NM au nord de CYVO, la station météorologique la plus proche du lieu de l’accident; l’accident s’est produit à 19 h 12. Le soleil s’est couché à 19 h 56 Note de bas de page 16.
L’enquête n’a pas permis de déterminer les conditions météorologiques exactes dans lesquelles le pilote est entré. Toutefois, il est probable que le pilote est entré dans des conditions météorologiques semblables à celles signalées à CYVO, en raison de sa proximité. Les bulletins météorologiques suivants ont été publiés à CYVO dans les heures précédant l’événement.
| Heure | Vent (Direction/ vitesse) |
Visibilité (SM) |
État du ciel | Température (°C) |
Point de rosée (°C) |
Altimètre (inHg) / Remarques |
|---|---|---|---|---|---|---|
| 18 h | 180° V/10 kt, rafales jusqu’à 21 kt | 10 SM dans les orages légers et la pluie | Couche de nuages épars à 3400 pieds;* ciel couvert à 9100 pieds | 21 | 19 | 29,72 |
| 18 h 21 | Variable/8 kt | 2½ SM dans les orages légers et la pluie | Couche de nuages épars à 3300 pieds, y compris des cumulonimbus; ciel couvert à 8000 pieds | 21 | 19 | 29,73 / saute de vent à 2200 pieds; visibilité à 6 SM au sud-est, pression augmentant rapidement |
| 18 h 33 | 040° V/8 kt, rafales jusqu’à 19 kt; variable de 290° V à 080° V | 4 SM dans les orages légers et la pluie | Couche de nuages épars à 2000 pieds; plafond avec nuages fragmentés à 3100 pieds, y compris des cumulonimbus; ciel couvert à 9000 pieds | 21 | 19 | 29,71 / Chute rapide de la pression |
| 19 h | Variable/7 kt | 6 SM dans les orages légers et la pluie | Quelques nuages à 1500 pieds; plafond de nuages fragmentés à 5000 pieds, y compris des cumulonimbus; cielcouvert à 8000 pieds | 21 | 20 | 29,70 / Chute rapide de la pression |
| 19 h 12 | 230° V/ rafales jusqu’à 15 kt | 2 SM dans les orages légers et la pluie | Plafond avec nuages fragmentés à 3000 pieds, y compris des nuages cumulonimbus; ciel couvert à 8000 pieds | 21 | 20 | 29,71 / Direction et vitesse du vent estimées |
* Les bases des nuages sont indiquées comme étant la hauteur au-dessus de la station par intervalle de 100 pieds jusqu’à une hauteur de 10 000 pieds, puis par intervalle de 1000 pieds.
1.8 Aides à la navigation
Selon les dossiers de NAV CANADA, il n’y a eu aucune anomalie signalée ni aucune interruption de maintenance prévue des aides à la navigation pour la région englobant la trajectoire de vol dans les régions d’information de vol de Toronto et de Montréal.
Au Canada, un plan de vol ou un itinéraire de vol permet d’échanger les renseignements sur l’aéronef et l’itinéraire et d’avertir les services d’alerte en cas de retard de l’aéronef. Aux États-Unis, on n’utilise pas d’itinéraires de vol et, même s’il existe des règlements de la FAA nécessitant le dépôt d’un plan de vol pour des vols à l’extérieur des États-Unis ou entre les États-Unis et le Canada, un plan de vol n’est pas requis pour un vol VFR intérieur. Le pilote n’avait pas déposé de plan de vol auprès du contrôle du trafic aérien (ATC). Cependant, il avait informé sa famille de son heure de décollage, de son itinéraire et de son heure estimée d’atterrissage.
1.8.1 Surveillance dépendante automatique en mode diffusion
La surveillance dépendante automatique en mode diffusion (ADS-B) est une technologie de surveillance du trafic aérien qui est utilisée pour surveiller le trafic aérien privé et commercial dans le monde entier.
Aux États-Unis, un système ADS-B au sol utilise un réseau de pylônes situés dans tout le pays et compte sur le fait que les aéronefs sont à portée des pylônes et à une altitude offrant une ligne de visée directe vers les pylônes. En date du 1er janvier 2020, les aéronefs qui volent dans la plupart des espaces aériens contrôlés par les États-Unis devaient être équipés d’un système ADS-B Out Note de bas de page 17.
Au Canada, un système ADS-B terrestre est utilisé pour couvrir l’espace aérien au-dessus de la baie d’Hudson, de l’île de Baffin et de la zone comprise entre le Labrador et le Groenland. Au cours des dernières années, Aireon, un consortium international de fournisseurs de services de navigation aérienne, dont NAV CANADA fait partie, a mis au point une technologie spatiale ADS-B. En mars 2019, NAV CANADA a commencé une mise en œuvre progressive des systèmes ADS-B spatiaux pour appuyer la surveillance du trafic aérien au Canada. De plus, grâce à la couverture mondiale d’Aireon, « les centres de coordination de sauvetage pourront […] obtenir l’emplacement et les données de suivi GPS d’un aéronef doté de l’avionique ADS-B dans le cadre d’une alerte, d’une phase de détresse ou d’une situation d’urgence » Note de bas de page 18.
Transports Canada (TC) n’a pas rendu obligatoire l’utilisation des ADS-B au Canada Note de bas de page 19. En novembre 2020 encore, le mandat de NAV CANADA sur les exigences de rendement des ADS-B n’indiquait pas le moment de la mise en œuvre. Toutefois, NAV CANADA collabore avec Transports Canada afin de faciliter la mise en œuvre et d’appuyer un mandat efficace.
Au moment de l’événement, la surveillance spatiale ADS-B n’était pas opérationnelle à l’ACC de Montréal. Toutefois, il était opérationnel dans d’autres régions du Canada, mais seulement au niveau de vol (FL) 290 Note de bas de page 20 et plus. Les contrôleurs en charge de l’espace aérien inférieur, dans lequel volait l’aéronef à l’étude, ne recevaient pas d’information de surveillance du système spatial ADS-B sur leurs écrans. Cela s’explique principalement par le fait que les cibles étaient filtrées, puisque les contrôleurs n’avaient pas encore le mandat d’utiliser ces renseignements à des fins de séparation. Par conséquent, l’ACC de Montréal ne pouvait ni suivre les progrès de l’aéronef, ni fournir de service de surveillance au moyen du système ADS-B. La mise en œuvre du système spatial ADS-B à l’ACC de Montréal a commencé en janvier 2020 dans l’espace aérien supérieur au FL 290 et plus.
1.8.2 Aireon Aircraft Locating and Emergency Response Tracking
Aireon offre un service de localisation d’urgence d’aéronefs à l’aide des données ADS-B et décrit le service comme suit [traduction] :
L’Aireon Aircraft Locating and Emergency Response Tracking (Aireon ALERT) fournit, sur demande, des renseignements sur la position de l’aéronef afin d’aider les autorités préalablement inscrites, comme les fournisseurs de services de navigation aérienne (FSNA), les exploitants d’aéronefs commerciaux et les compagnies aériennes, les organismes de réglementation et les organismes de recherche et de sauvetage, lorsqu’un utilisateur inscrit détermine qu’un aéronef est dans une phase d’incertitude, d’alerte ou de détresse.
Aireon ALERT fournit, sur demande, la dernière position ou trajectoire connue d’un aéronef qui a été jugé être dans une phase d’incertitude, d’alerte ou de détresse […] Aireon ALERT permet d’obtenir avec précision l’emplacement et la trajectoire de vol de tout aéronef équipé d’un système ADS-B OUT à une fréquence de 1090 MHz, peu importe la région, l’emplacement, le terrain ou le statut de client d’Aireon Note de bas de page 21.
Au moment de l’événement, un rapport typique comprenait les 15 derniers points de données du vol, prélevés à des intervalles d’environ 1 minute (Figure 4 ).

Depuis l’événement, Aireon a amélioré le rapport Aireon ALERT. En plus de fournir les 15 dernières minutes de vol détecté à intervalles de 1 minute, la dernière minute de vol comprend maintenant des mises à jour à intervalles de 5 secondes.
1.8.3 Données de surveillance dépendante automatique en mode diffusion d’Aireon et de NAV CANADA
Les données ADS-B ont été utilisées pour examiner la trajectoire de vol de l’aéronef à l’étude.
À l’aide de ces données de surveillance, l’enquête a permis de déterminer que le virage final à droite a été suivi d’un piqué en spirale sans récupération. Plus précisément, la trajectoire de vol montre que le virage à droite s’est poursuivi en une descente qui s’est muée en un piqué en spirale de plus en plus serré d’au moins 1,5 tour de boussole. La vitesse de l’aéronef a augmenté continuellement et peut avoir atteint jusqu’à 240 nœuds de vitesse corrigée (KCAS). Le taux de descente peut avoir atteint jusqu’à 20 000 pi/min. L’angle d’inclinaison a atteint au moins 90° à droite et l’angle de tangage peut avoir atteint 60° en piqué. Une vitesse de 240 KCAS est considérablement supérieure à la vitesse anémométrique à ne jamais dépasser (VNE) de 195 KCAS Note de bas de page 22, ce qui place l’aéronef au-delà de son domaine de conception structurale approuvé et présente un risque de dépasser les limites de charge structurelle pendant une manœuvre de récupération.
Le dernier point de données a été enregistré à 19 h 12 min 30 s. À ce moment-là, l’aéronef franchissait 2325 pieds ASL en descente, soit environ 1300 pieds AGL. La collision avec le relief s’est probablement produite entre 2 et 3 secondes après le dernier point de données.
1.9 Communications
On n’a enregistré aucun appel de détresse d’urgence provenant de l’aéronef sur les fréquences de l’ACC de Toronto ou de l’ACC de Montréal.
1.10 Renseignements sur l’aérodrome
Sans objet.
1.11 Enregistreurs de bord
L’aéronef n’était équipé ni d’un enregistreur de données de vol, ni d’un enregistreur de conversations de poste de pilotage, et il n’était pas tenu d’en avoir selon la réglementation.
1.12 Renseignements sur l’épave et sur l’impact
Le site de l’événement se trouvait dans une zone fortement boisée à 48° 28′19″N, 077° 02′52″O, à plus de 350 NM au nord de la trajectoire prévue de KOSH à KDXR, et à 452 NM de KDXR. L’aéronef a percuté des arbres à vitesse élevée, 32 pieds avant la collision avec le terrain et à un angle d’environ 30° sous l’horizon. Les débris s’étendaient sur environ 85 pieds.
La plupart des pièces de l’aéronef, y compris les ailes et l’empennage papillon, se trouvaient sur les lieux de l’événement. Le moteur a été retrouvé dans un cratère d’environ 6 à 10 pieds de profondeur. Le moteur, le système de carburant de l’aéronef, les commandes de vol, le tableau de bord, les sièges du poste de pilotage et les ceintures de sécurité ont tous été trouvés lourdement endommagés et très fragmentés. Par conséquent, il a été impossible d’établir la continuité des commandes de vol et des commandes du moteur. De plus, il n’a été possible de déterminer la position d’aucun des interrupteurs des instruments. Le moyeu de l’hélice a été brisé en morceaux.
L’examen du site et de l’épave a montré qu’il n’y a pas eu de rupture ou de séparation en vol de l’aile ou de l’empennage papillon. L’enquête n’a permis de déceler aucune défaillance matérielle ou défectuosité d’un composant avant l’impact.
1.13 Renseignements médicaux et pathologiques
Rien n’indiquait que le rendement du pilote avait été compromis par la fatigue ou par des facteurs médicaux.
1.14 Incendie
Il n’y a aucun signe d’incendie avant ou après l’impact.
1.15 Questions relatives à la survie des occupants
La collision avec le relief n’offrait aucune chance de survie en raison de la force de l’impact.
1.15.1 Radiobalise de repérage d’urgence
L’aéronef à l’étude était équipé d’une radiobalise de repérage d’urgence (ELT) capable d’émettre sur les fréquences de 121,5 MHz et de 243 MHz, qui a été détruite au moment de l’impact. En raison de l’ampleur des dommages, on n’a pu effectuer aucun essai fonctionnel sur l’unité.
Depuis le 1er février 2009, les satellites Cospas-Sarsat Note de bas de page 23 ne détectent plus les balises de détresse émettant à la fréquence de 121,5 MHz et l’aéronef à l’étude n’était pas équipé d’une ELT émettant à une fréquence de 406 MHz. Par conséquent, aucun signal n’aurait pu être détecté par les satellites Cospas-Sarsat.
1.15.2 Recherche et sauvetage
1.15.2.1 Généralités
Au Canada, l’intervention en matière de recherche et de sauvetage est coordonnée avec les Forces armées canadiennes, la Garde côtière canadienne, les services de police (comme la GRC [Gendarmerie royale du Canada], la Police provinciale de l’Ontario, la Sûreté du Québec) et les organismes bénévoles (comme l’Association civile de recherche et de sauvetage aérien, Sauvetage et recherche aériens du Québec). Dans l’événement à l’étude, le Centre conjoint de coordination de sauvetage (JRCC) de Trenton était responsable de l’intervention de recherche et de sauvetage Note de bas de page 24.
1.15.2.2 Centre conjoint de coordination de sauvetage (JRCC) de Trenton
Le JRCC de Trenton a été avisé que l’aéronef avait disparu à 23 h 31 le 29 juillet 2019, et il a lancé son intervention de recherche et de sauvetage. À 00 h 49, le 30 juillet 2019, le JRCC de Trenton a obtenu quelques données initiales du système ADS-B terrestre du Air Force Rescue Coordination Center des États-Unis, qui avait enregistré la position et l’altitude GPS de l’aéronef pour la dernière fois à 19 h 11 min 42 s. Le JRCC de Trenton a utilisé ce point de données pour déterminer la zone de recherche. Ces données initiales correspondaient aux données qui étaient disponibles sur Internet par l’entremise de plusieurs réseaux différents de récepteurs terrestres privés du système ADS-B. Le point de données était à 48° 28′02″N, 077° 03′50″O, à une altitude de 7600 pieds ASL, et se trouvait à 4638 pieds (0,76 NM) du lieu de l’écrasement réel (Figure 5).

Le JRCC de Trenton a utilisé ce point de données initial comme dernière position connue Note de bas de page 25. Toutefois, en raison de l’absence d’un plan de vol, de la couverture radar limitée au-dessous de 8000 pieds ASL dans ce secteur, de l’absence de données ADS-B disponibles au-dessous de 7600 pieds ASL, de l’absence de signal de l’ELT et de l’absence d’indication que l’aéronef s’était écrasé, le JRCC de Trenton s’est concentré sur la localisation d’un aéronef perdu ou disparu. En fonction de la distance franchissable par l’aéronef, la zone de recherche globale a été définie comme une zone ayant un rayon de 250 NM. Le couvert forestier dense a rendu les méthodes de recherche visuelle aérienne difficiles et parfois inefficaces.
Les ressources allouées à la recherche comprenaient 20 avions civils et militaires, qui ont collectivement effectué plus de 300 heures de vol.
À 17 h 59, le 2 août 2019, après avoir effectué des recherches pendant 4 jours, le JRCC de Trenton a reçu de la Civil Air Patrol des États-Unis de meilleures données du système ADS-B spatial, qui comprenaient plus de détails sur la trajectoire de vol et une mise à jour de la dernière position connue. Cette position mise à jour correspondait à la dernière position dans le rapport d’Aireon ALERT, soit 48° 28′25″N, 077° 02′43″O, à une altitude de 2300 pieds ASL et à 850 pieds (0,14 NM) du lieu de l’écrasement réel (figure 6). L’épave n’était pas visible du ciel, mais des équipes de recherche et de sauvetage ont mené des recherches au sol pour trouver le site.

1.15.2.3 Accès aux données de surveillance dépendante automatique en mode diffusion
NAV CANADA reçoit un ensemble prédéterminé de données ADS-B d’Aireon pour appuyer ses activités de surveillance de l’espace aérien canadien et peut également recevoir des rapports d’Aireon ALERT. Les Services d’ingénierie de NAV CANADA collaborent étroitement avec Aireon pour déveloper, améliorer et entretenir la capacité ADS-B d’Aireon. Ce travail comprend l’accès à une quantité importante de données ADS-B. Ces données améliorées sont considérablement plus précises que les renseignements fournis dans un rapport d’Aireon ALERT, mais elles ne sont pas facilement accessibles aux clients. De plus, les Services d’ingénierie n’ont ni le mandat de fournir les données du système ADS-B pour les opérations de recherche et de sauvetage, ni le personnel nécessaire pour le faire.
Au cours de la recherche, pour aider aux opérations de recherche et de sauvetage, le JRCC de Trenton a demandé et a reçu des données vocales et radar de NAV CANADA. Cependant, cette demande ne comprenait pas les données ADS-B.
Le système ADS-B spatial est une nouvelle technologie au Canada. En mars 2019, NAV CANADA a commencé une mise en œuvre progressive du système ADS-B spatial pour appuyer la surveillance du trafic aérien au Canada. Au moment de l’événement, le JRCC de Trenton savait que la technologie ADS-B était disponible au Canada depuis mars 2019, mais aussi que les aéronefs exploités au Canada n’étaient pas tous équipés de cette technologie. Par conséquent, le JRCC n’a pas inclus les données ADS-B dans ses demandes de données Note de bas de page 26 à NAV CANADA.
De plus, le JRCC de Trenton ne connaissait pas le service Aireon ALERT. Par conséquent, il ne savait pas que NAV CANADA avait accès aux données du système ADS-B ou aux données d’Aireon ALERT. Le JRCC de Trenton ne savait pas non plus que ces données pouvaient être demandées à NAV CANADA ou obtenues en s’abonnant directement au service Aireon ALERT.
1.16 Essais et recherches
1.16.1 Rapports de laboratoire du BST
Le BST a produit les rapports de laboratoire suivants dans le cadre de la présente enquête :
- LP209/2019 – NVM Data Recovery [Récupération des données de la mémoire non volatile]
- LP227/2019 – Flight Path Analysis [Analyse de la trajectoire de vol]
- LP249/2019 – Instrument Analysis [Analyse des instruments]
1.17 Renseignements sur l’organisme et sur la gestion
Sans objet.
1.18 Renseignements supplémentaires
1.18.1 Vol selon les règles de vol à vue dans des conditions météorologiques de vol aux instruments
Les données du BST sur les accidents montrent que le maintien du vol VFR dans des conditions météorologiques défavorables ou des conditions météorologiques de vol aux instruments (IMC) représente une menace importante pour la sécurité aérienne. Un vol VFR qui se poursuit dans des IMC expose le pilote à un risque d’accident causé par une perte de maîtrise ou un impact sans perte de contrôle.
Le BST a examiné ses données afin de déterminer le nombre d’accidents dans lesquels des pilotes en vol VRF sont entrés dans des IMC. De 1992 à 2019, on a recensé 168 accidents et 205 pertes de vies.
1.18.2 Désorientation spatiale
La désorientation spatiale se définit comme étant l’incapacité du pilote [traduction] « d’interpréter correctement l’assiette, l’altitude ou la vitesse anémométrique de l’aéronef par rapport à la Terre ou à d’autres points de référence » Note de bas de page 27, Note de bas de page 28.
Tous les humains requièrent et reçoivent des renseignements sensoriels du système visuel (les yeux), du système vestibulaire (les organes d’équilibre dans l’oreille interne) et du système proprioceptif (connu sous le nom de « pilotage par sensation » ― les récepteurs de pression dans tout le corps qui contribuent au sens général de l’orientation) Note de bas de page 29. Les humains traitent les renseignements provenant de ces systèmes pour déterminer leur position dans le temps et l’espace, et par rapport à la surface de la Terre. Malheureusement, les humains sont sensibles aux illusions visuelles ou vestibulaires, qui peuvent influer sur la façon dont une personne interprète l’information reçue, vue ou ressentie, ce qui peut entraîner une désorientation spatiale. Les illusions visuelles ou vestibulaires pertinentes à cette enquête comprennent l’illusion d’inclinaison, l’effet de Coriolis et la spirale de la mort (piqué en spirale).
- L’illusion d’inclinaison est une illusion courante selon laquelle, lorsqu’il revient en vol rectiligne et en palier après un roulis ou un virage prolongé, le pilote peut percevoir un virage dans la direction opposée. La désorientation spatiale [traduction] « peut se produire lorsque le mouvement est inférieur au seuil sensoriel pour le canal semi-circulaire (de 0,2 à 8,0 degrés par seconde), particulièrement pendant un mouvement de rotation lent » Note de bas de page 30.
- L’effet de Coriolis se produit lorsque l’aéronef fait un mouvement de roulis ou de virage prolongé et que le pilote déplace brusquement sa tête dans un autre plan que le plan de rotation de l’aéronef (p. ex., vers le bas ou vers l’arrière). La combinaison du long mouvement de roulis ou de virage (stabilisant le liquide dans l’oreille interne) et du mouvement soudain de la tête (provoquant une réaction opposée dans l’oreille interne) stimule le système vestibulaire, créant une sensation de basculement Note de bas de page 31.
- La spirale de la mort (piqué en spirale) est une illusion insidieuse selon laquelle un pilote ne remarque pas au départ un enfoncement de l’aile (augmentation de l’angle d’inclinaison) et la diminution résultante de l’assiette en tangage de l’aéronef (augmentation de la vitesse anémométrique). Cela peut se traduire par un virage lent en descente graduelle avec une vitesse anémométrique croissante. Ainsi, [traduction] « Alors que l’aéronef descend en spirale et que son taux de descente s’accélère, le pilote perçoit la descente, mais pas le virage. Comme l’angle d’inclinaison a progressivement augmenté, toute manipulation des commandes ne fait que resserrer le virage et augmenter le taux de descente Note de bas de page 32. »
Dans un environnement visuel dégradé (comme un vol intentionnel ou involontaire dans des IMC) où le pilote est incapable de maintenir une référence visuelle avec le sol, ces illusions peuvent mener à des manipulations inappropriées des commandes de vol et entraîner une perte de maîtrise. Ces illusions peuvent être si fortes que même une vérification consciente des instruments de vol pourrait être insuffisante pour inciter le pilote à effectuer les corrections adéquates.
1.18.3 Conscience situationnelle
La conscience situationnelle peut être définie comme étant [traduction] « la perception des éléments dans l’environnement à l’intérieur d’un volume de temps et d’espace, la compréhension de leur signification, et la projection de leur état à court terme » Note de bas de page 33.
Le maintien de la conscience situationnelle découle donc de 3 processus distincts. D’abord, un pilote doit percevoir l’information dans l’environnement; ensuite, il doit établir la pertinence de cette information à l’égard de la capacité d’atteindre ses objectifs opérationnels; enfin, il doit utiliser cette information pour prévoir les états et les événements futurs. Ainsi, un pilote maintient sa conscience situationnelle, ce qui lui permet de [traduction] « planifier et se préparer aux imprévus » Note de bas de page 34, et donc de prendre de meilleures décisions. Chacun des 3 processus comprend des étapes de traitement de l’information où des failles peuvent survenir, donnant lieu à une conscience situationnelle incomplète ou insuffisante.
La formation, les connaissances, l’expérience et les idées préconçues d’un pilote font partie des facteurs individuels qui influent sur sa compréhension d’une situation Note de bas de page 35. D’autres problèmes auxquels font face les pilotes lorsqu’ils volent, comme la charge de travail, la distraction, les contraintes de temps, les défectuosités de l’équipement, les changements dans les conditions météorologiques, le manque de connaissance d’une région géographique et le vol de nuit, peuvent également avoir une incidence sur la conscience situationnelle.
1.18.4 Prise de décision du pilote
La prise de décisions du pilote (PDP) est un processus cognitif qui permet de choisir un plan d’action parmi diverses options. De nombreuses décisions sont prises au sol, et une décision bien éclairée avant un vol écarte la nécessité de prendre une décision beaucoup plus difficile en vol. Une composante importante de la PDP est une bonne conscience situationnelle.
D’autres facteurs peuvent avoir une incidence sur la prise de décisions du pilote, comme la pression de la famille ou de l’employeur pour arriver à destination à une certaine heure; les répercussions financières de l’atterrissage à un aéroport de dégagement, comme la nécessité d’obtenir des services aux aéronefs, du transport, des repas ou de l’hébergement; ou des problèmes administratifs comme le dédouanement à la suite d’un atterrissage dans un autre pays.
1.18.5 Tendance à s’en tenir au plan
La tendance à s’en tenir au plan se décrit comme [traduction] « une tendance cognitive inconsciente consistant à poursuivre les activités prévues malgré des changements de conditions » Note de bas de page 36 ou « une tendance profondément enracinée des gens à poursuivre leur plan d’action initial même quand un changement justifie l’adoption d’un nouveau plan » Note de bas de page 37. Une fois qu’un plan a été établi et mis en œuvre, il devient de plus en plus difficile de reconnaître que des stimuli ou des conditions dans l’environnement exigent d’apporter des changements au plan. Souvent, ces stimuli et conditions sont évidents pour des personnes extérieures à la situation, mais à mesure que sa charge de travail augmente, il peut être très difficile pour un pilote en train d’exécuter un plan de reconnaître l’importance des indices et le besoin de modifier le plan Note de bas de page 38.
1.18.6 Hypoxie
Dans cet événement, le pilote a volé au-dessus de 10 000 pieds ASL, mais pas plus de 11 500 pieds, pendant 2 heures 18 minutes. Le pilote est ensuite descendu en dessous de 10 000 pieds ASL et a volé à une altitude inférieure pendant 44 minutes avant l’accident. Même si on a retrouvé une bouteille d’oxygène sur le lieu de l’écrasement, il a été impossible de déterminer si elle avait été utilisée pendant la partie du vol au-dessus de 10 000 pieds ASL. Étant donné que le règlement de la FAA n’exige l’utilisation d’oxygène supplémentaire qu’au-dessus de 12 500 pieds ASL, et que le pilote a choisi et adopté une altitude de croisière de 11 500 pieds ASL, il est possible qu’il ait décidé de ne pas utiliser d’oxygène supplémentaire.
L’enquête a permis de conclure qu’il était peu probable que l’hypoxie ait joué un rôle dans cet accident.
1.19 Techniques d’enquête utiles ou efficaces
Dans l’événement à l’étude, les données du système ADS-B spatial ont aidé à réduire la zone de recherche et à localiser l’aéronef écrasé, et ont permis au BST de reconstituer la trajectoire de vol.
2.0 Analyse
Le pilote possédait les licences et les qualifications requises pour effectuer le vol, conformément à la réglementation de la Federal Aviation Administration (FAA) des États-Unis. Les dossiers indiquent que l’aéronef était homologué, équipé et entretenu conformément à la réglementation en vigueur et aux procédures approuvées. L’enquête a permis de déterminer qu’il n’y a pas eu de rupture ou de séparation en vol de l’aile ou de l’empennage papillon.
Le profil de vol et les données météorologiques portent à croire que le pilote déviait de sa route pour tenter de contourner ou de dépasser un front mouvant d’orages et d’éclairs. Il est probable que l’aéronef est entré par la suite dans des conditions météorologiques de vol aux instruments (IMC) et que le pilote a connu une désorientation spatiale. L’aéronef a effectué un piqué en spirale et a percuté le relief.
L’analyse cernera les facteurs susceptibles d’avoir joué un rôle dans l’événement et la séquence de l’accident. Les facteurs qui ont une incidence sur la recherche et le sauvetage seront également abordés.
2.1 Incidence de la tendance à s’en tenir au plan sur la conscience situationnelle et la prise de décision du pilote
Les nombreuses déviations vers le nord ont toutes été suivies de corrections graduelles pour reprendre une trajectoire vers l’est. Aucune de ces corrections de cap n’a permis de traverser le phénomène météorologique ou de retrouver une trajectoire appropriée vers la destination d’origine, soit l’aéroport municipal de Danbury (KDXR), au Connecticut (États-Unis).
Ces tentatives infructueuses continuelles et les conditions météorologiques défavorables qui l’entouraient étaient des indices qui auraient dû suggérer un changement au plan initial du pilote, comme se dérouter vers l’un des nombreux aéroports de dégagement appropriés le long de la route ou poursuivre le vol selon les règles de vol aux instruments (IFR). Quand le pilote s’est trouvé dans l’espace aérien canadien, au-dessus de la province de Québec, il ne lui était plus possible d’atteindre sa destination prévue, KDXR, distante de plus de 450 milles marins. L’adhérence au plan initial indique que la prise de décision du pilote était probablement influencée par la tendance à s’en tenir au plan. Par conséquent, le pilote a poursuivi le vol, probablement jusqu’à ce qu’il ne puisse plus continuer de voler dans des conditions météorologiques de vol à vue.
La prise de décision du pilote a probablement été influencée par la tendance à s’en tenir au plan, ce qui l’a poussé à poursuivre un vol selon les règles de vol à vue (VFR) dans des conditions météorologiques défavorables.
2.2 Vol selon les règles de vol à vue dans des conditions météorologiques de vol aux instruments
Le vol VFR en IMC représente une menace importante pour la sécurité aérienne. Un vol VFR qui se poursuit dans des IMC expose le pilote à un risque d’accident causé par une perte de maîtrise ou un impact sans perte de contrôle.
En plus de dévier de sa trajectoire pour contourner ou dépasser le front mouvant d’orages et d’éclairs, l’aéronef peut aussi avoir volé au-dessus des nuages ou entre des couches de nuages. Les multiples modifications de la trajectoire indiquent que le pilote tentait probablement de continuer à voler en VFR et d’éviter d’entrer dans des IMC.
Si le pilote est entré par inadvertance dans un nuage ou dans des IMC, il ne lui était peut-être plus possible de voler avec une référence visuelle au sol, ce qui l’aurait obligé à piloter en se fiant uniquement aux instruments.
Pour voler en toute sécurité dans des IMC, il faut suivre une formation et s’entraîner régulièrement. Même si le pilote avait obtenu une qualification de vol aux instruments, l’enquête n’a pas permis de déterminer s’il avait une expérience récente de vol dans ces conditions ou s’il avait tenté de passer aux IFR.
Si les pilotes n’ont pas d’expérience récente de vol en IMC, ils peuvent ne pas posséder les habiletés et la compétence requises pour le faire, ce qui augmente le risque de perte de contrôle et d’accident.
2.3 Désorientation spatiale
La désorientation spatiale est un danger courant dans l’aviation et peut entraîner une perte de contrôle. Le fait de voler dans un environnement visuel dégradé, comme dans des IMC, sans référence au sol, augmente la susceptibilité du pilote à la désorientation spatiale.
Dans le virage lent à gauche précédant le piqué en spirale, si le pilote dans l’événement à l’étude était touché par une illusion visuelle ou vestibulaire, il est possible qu’en voulant arrêter le virage ou ramener l’aéronef en vol rectiligne et en palier, le pilote ait surcorrigé et provoqué le virage à droite et la descente dans la direction opposée. Le virage lent et graduel à droite qui a suivi peut avoir conduit à un piqué en spirale si le pilote a augmenté le cabrage pour tenir compte du taux de descente, sans se rendre compte de l’angle d’inclinaison croissant.
Les données du système de surveillance dépendante automatique en mode diffusion (ADS‑B) montrent que l’aéronef a effectué une descente en spirale avec un taux de descente croissant qui indique un piqué en spirale. La trajectoire de vol porte à croire que le pilote a été victime d’une désorientation spatiale en raison d’une illusion visuelle ou vestibulaire et que, par conséquent, l’aéronef a effectué un piqué en spirale et a percuté le relief.
2.4 Recherche et sauvetage
Au moment de l’événement, les données ADS-B n’étaient incluses dans aucune demande de données présentées par le Centre conjoint de coordination des opérations de sauvetage (JRCC) à NAV CANADA. L’enquête a permis de déterminer que le niveau de connaissances de l’ADS-B, y compris le système ADS-B spatial, et d’Aireon était limité au JRCC et dans la communauté de recherche et de sauvetage (SAR). Le personnel du JRCC de Trenton ne savait pas que le service ADS-B Aircraft Locating Emergency Response Tracking (ALERT) d’Aireon était opérationnel, que NAV CANADA avait accès aux données ADS-B ou aux données d’Aireon ALERT, ou encore que ces données étaient disponibles soit en les demandant à NAV CANADA, soit en s’abonnant directement aux services d’Aireon ALERT.
Si les autorités de recherche et de sauvetage n’ont pas accès aux données des technologies émergentes, comme le système ADS-B spatial, ou ne les utilisent pas en temps opportun, il y a un risque qu’à la suite d’un accident, les services de recherche et de sauvetage susceptibles de sauver des vies soient retardés.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- La prise de décision du pilote a probablement été influencée par la tendance à s’en tenir au plan, ce qui l’a poussé à poursuivre un vol selon les règles de vol à vue dans des conditions météorologiques défavorables.
- La trajectoire de vol porte à croire que le pilote a été victime d’une désorientation spatiale en raison d’une illusion visuelle ou vestibulaire et que, par conséquent, l’aéronef a effectué un piqué en spirale et a percuté le relief.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les pilotes n’ont pas d’expérience récente de vol dans des conditions météorologiques de vol aux instruments, ils peuvent ne pas posséder les habiletés et la compétence requises pour le faire, ce qui augmente le risque de perte de contrôle et d’accident.
- Si les autorités de recherche et de sauvetage n’ont pas accès aux données des technologies émergentes, comme le système spatial de surveillance dépendante automatique en mode diffusion, ou ne les utilisent pas en temps opportun, il y a un risque qu’à la suite d’un accident, les services de recherche et de sauvetage susceptibles de sauver des vies soient retardés.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Centre conjoint de coordination de sauvetage
Les intervenants en recherche et sauvetage du ministère de la Défense nationale (c.-à-d. la Direction de la sécurité des vols, la 1re Division aérienne du Canada, le Commandement des opérations interarmées du Canada et les 3 Centres conjoints de coordination de sauvetage [JRCC]) ont été informés de l’existence du service Aireon Aircraft Locating Emergency Response Tracking (Aireon ALERT) et de l’exigence de demander expressément des données de surveillance dépendante automatique en mode diffusion (ADS-B).
Depuis cet accident, les 3 JRCC ont ouvert un compte auprès d’Aireon ALERT et les coordonnateurs demandent régulièrement ces données lorsqu’ils enquêtent sur des aéronefs en retard ou disparus.
Le présent rapport conclut l'enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Il a été officiellement publié le .